A capacidade do seu veículo de entender o ambiente ao seu redor é obtida por meio de vários sistemas e tipos de sensores. A interpretação que o veículo faz dos dados coletados ajuda a informar seu comportamento, especialmente para os recursos de suporte à condução
| Câmeras | As câmeras funcionam de forma semelhante ao olho humano. O que elas capturam é usado para diferentes finalidades, o que depende da câmera. Por exemplo, a câmera dianteira superior ajuda o veículo a identificar coisas como sinais de trânsito e marcações na pista, enquanto o que a câmera de estacionamento traseira captura aparece no visor. |
| Radares | Os radares usam ondas de rádio para coletar informações sobre o entorno do veículo. Eles podem identificar a distância até os objetos e certos aspectos do movimento deles. Essas informações são essenciais para vários recursos do veículo. |
| Sensores de estacionamento ultrassônicos | Esses sensores usam ondas sonoras para detectar objetos relativamente próximos. Eles funcionam enviando pulsos ultrassônicos que podem retornar aos sensores quando encontram um objeto. |
Como os sistemas funcionam juntos
Os diferentes tipos de detecção se complementam. Às vezes, eles são usados sozinhos e, às vezes, juntos.
Importante
Limitações gerais de detecção e identificação
- O veículo nem sempre consegue lidar com situações imprevisíveis ou incomuns. Quando o veículo tem dificuldade para identificar corretamente o ambiente ou a situação do tráfego, a precisão de sua resposta é afetada.
- Os danos ao veículo podem afetar a detecção e os recursos de confiança. Muitas falhas podem ser identificadas pelo veículo, mas algumas podem não ser possíveis de serem identificadas por ele mesmo. É por isso que é importante garantir que o veículo esteja em boas condições e funcionando. Entre em contato com uma Oficina Volvo autorizada se suspeitar de alguma falha ou se notar danos no veículo.
- Os fatores e condições limitantes podem coincidir, e frequentemente coincidem. Eles podem se combinar e interagir de forma que resultem em uma resposta incorreta do veículo.
Limitações da detecção de obstáculos
A detecção de obstáculos ajuda o veículo a identificar determinados objetos estacionários e em movimento. Esses objetos podem ser outros usuários da rodovia, como pedestres ou outros veículos, animais, barreiras ou outros objetos. Se estiverem dentro ou perto do caminho de condução do veículo, podem representar um risco de colisão. Dependendo das circunstâncias, o veículo poderá avisar ou intervir se o objeto for identificado com precisão. Para todos os tipos de objetos que o veículo pode identificar, há muitos fatores que podem impedir a identificação precisa. Exemplos de fatores limitantes, situações e eventos incluem:
- Objetos e usuários da rodovia muito espaçados, sobrepostos ou parcialmente bloqueados.
- Objetos e usuários de rodovias que se misturam ao fundo.
- Objetos e usuários da rodovia que se movem ou aceleram particularmente rápido.
- Veículos incomuns, como bicicletas reclinadas, colheitadeiras ou reboques com cargas de formato estranho.
- Bicicletas de um tipo ou tamanho diferente em comparação com uma bicicleta normal de adulto.
- Novos meios de transporte.
- Roupas ou objetos carregados que alteram a silhueta de um pedestre.
- Pedestres com menos de 80 cm (32 polegadas).
- Obstáculos inclinados de forma a criar uma silhueta desconhecida.
- Tamanho e velocidade dos animais. Os cães e gatos geralmente são muito pequenos para serem identificados de forma confiável.
Nota
Exemplos de detecção de tráfego
Os exemplos seguintes de diferentes cenários de trânsito podem ajudar você a entender algumas das limitações dos sistemas de detecção do veículo. Os cenários do mundo real geralmente são mais complexos do que os seguintes exemplos ilustrativos 1 deste manual..
Fora do campo de visão e detecção tardia
As várias zonas de detecção ao redor do veículo são estáticas, cada uma com um alcance e um campo de visão limitados. Se algo entrar em uma zona de detecção em um ângulo incomum, em alta velocidade ou muito próximo ao seu veículo, isso pode causar uma resposta rápida. Isso reduz as margens de segurança em comparação com uma situação em que a detecção antecipada fosse possível.
Importante
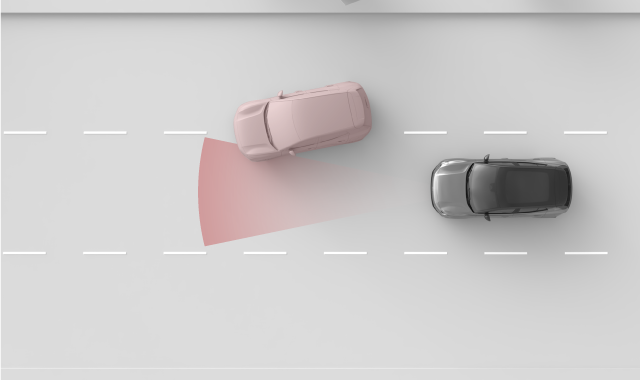
Posicionamento na faixa e veículos pequenos
Para a detecção a frente, o meio da faixa é mais favorável em comparação com suas partes externas. Os veículos podem passar despercebidos se não ocuparem o meio da faixa. Embora isso possa acontecer com qualquer veículo, o risco é maior para veículos pequenos, como motocicletas. Eles ocupam menos largura da faixa e podem se movimentar mais dentro da faixa. Sempre preste mais atenção a qualquer veículo que não esteja dirigindo no meio da faixa.
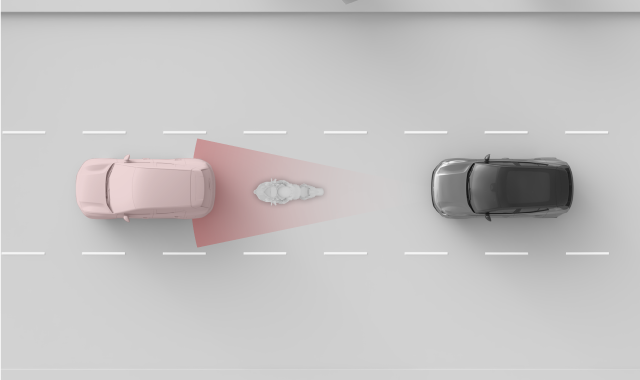
Forma, tamanho e número de objetos
- Objetos pequenos são mais difíceis de identificar.
- Quanto mais objetos, mais difícil é identificar cada um deles.
- Os objetos próximos que se sobrepõem são mais difíceis de identificar.
- Objetos com formas não uniformes, como saliências ou partes que sobressaem, são mais difíceis de identificar.
A presença de um veículo grande na frente pode dificultar a identificação de um veículo menor, como uma motocicleta.
Importante
Reboque na frente
Em comparação com muitos outros veículos na rodovia, a detecção de reboques geralmente é menos confiável devido à sua forma e altura. Isso se aplica, em particular, a reboques estreitos, reboques baixos e reboques com plataformas de carga muito altas. Esses tipos de reboques geralmente não têm área de superfície suficiente na altura em que os sistemas de detecção frontal se concentram.
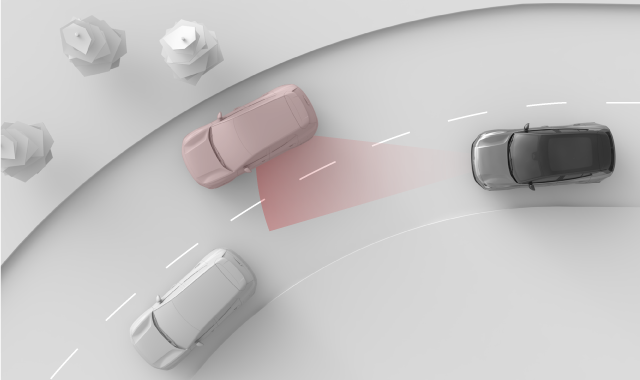
Rodovia e infraestrutura
As curvas na rodovia podem fazer com que o veículo interprete erroneamente a situação do tráfego. Por exemplo, ele pode perder o controle de um veículo ou identificar incorretamente em qual faixa o veículo adiante está.
Importante
Condições e irregularidades da rodovia
- Curvas acentuadas e solavancos na rodovia podem obscurecer temporariamente partes importantes dos arredores do veículo, como outros veículos ou marcações na rodovia.
- Uma infraestrutura de rodovia fora do padrão ou incomum pode não ser identificada corretamente pelo veículo. Por exemplo, obras na pista ou desvios de tráfego podem resultar em conjuntos múltiplos ou conflitantes de marcações na pista.
- As marcações ou sinalizações de rodovia desgastadas podem não ser identificadas corretamente.