Teie auto mõistab oma ümbrust mitmete süsteemide ja anduritüüpide abil. Auto kogutud andmete tõlgendus aitab teha teavitatud valikuid, eriti juhi abisüsteemi funktsioonide osas.
| Kaamerad | Kaamerad töötavad sarnaselt inimsilmale. Nende kogutud teavet kasutatakse mitmesuguseks otstarbeks, mis sõltub kaamerast. Näiteks aitab eesmine ülemine kaamera autol tuvastada liiklusmärke ja teemärgistust, samas kui tagumise parkimiskaamera vaade kuvatakse keskekraanil. |
| Radarid | Radarid kasutavad auto ümbruse kohta andmete kogumiseks raadiolaineid. Need teevad kindlaks kauguse objektidest ja nende liikumise teatud aspektid. See teave on oluline paljude auto funktsioonide korral. |
| Laserlokaator | Laserlokaator kasutab auto ümbruse kohta andmete kogumiseks valguslaineid. Sellel on auto ees asuvate objektide kaugelt tuvastamise võime, kuid see võib tuvastada ka lähedal asuvaid objekte. |
| Ultraheli parkimisandurid | Need andurid kasutavad suhteliselt lähedal asuvate objektide tuvastamiseks helilaineid. Need saadavad ultraheliimpulsse, mis objekti leidmisel andurile tagasi põrkuvad. |
Kuidas süsteemid koos töötavad
Erinevad tuvastamise tüübid täiendavad üksteist. Mõnikord kasutatakse neid omaette ja mõnikord koos.
Oluline
Üldised tuvastamise ja äratundmise piirangud
- Auto ei suuda alati ootamatute või kummaliste olukordadega toime tulla. Kui autol on keeruline keskkonda või liiklusolukorda tuvastada, siis mõjutab see auto reaktsioonivõimet.
- Auto kahjustused võivad mõjutada tuvastamist ja seda kasutavaid funktsioone. Auto võib määratleda mitmesuguseid rikkeid, kuid mõne tuvastamine ei pruugi võimalik olla. Seetõttu on oluline veenduda, et auto oleks heas seisundis ja töökorras. Kui kahtlustate mistahes rikke esinemist või märkate auto kahjustust, pöörduge volitatud Volvo teeninduse poole.
- Piiravad tegurid ja tingimused langevad sageli kokku. Need võivad koonduda ja toimida viisil, mis põhjustab auto ebakorrektset reageerimist.
Takistuse tuvastamise piirangud
Takistuse tuvastamine aitab autol teatud paigalseisvaid ja liikuvaid objekte ära tunda. Need võivad olla teised liiklejad, näiteks jalakäijad või teised sõidukid, loomad, barjäärid või muud objektid. Liikuva auto teel või selle läheduses olevad objektid võivad tekitada kokkupõrkeohtu. Olukorrast lähtuvalt võib auto objekti korrektse ära tundmise korral juhti hoiatada või sekkuda. Kõigi objektitüüpide puhul, mida auto suudab ära tunda, on mitmeid korrektset äratundmist takistavaid tegureid. Piiravad tegurid, olukorrad ja sündmused on näiteks:
- Lähestikku paiknevad, kattuvad või osaliselt blokeeritud objektid ja liiklejad.
- Objektid ja liiklejad, mis sulanduvad taustaga.
- Eriti kiiresti liikuvad või kiirendavad objektid ja liiklejad.
- Ebaharilikud sõidukid, näiteks kaldus jalgratas, kombain või veidra kujuga koormat vedav haagis.
- Jalgrattad, mille tüüp või kuju erineb tavalisest täiskasvanu jalgrattast.
- Uued transpordiviisid.
- Jalakäija siluetti muutvad rõivad või esemed.
- Jalakäijad, kes on lühemad kui 80 cm (32 tolli).
- Takistused, mis on tundmatut siluetti loova nurga all.
- Loomade kuju ja kiirus. Kassid ja koerad on usaldusväärseks äratundmiseks sageli liiga väikesed.
Märkus
Liikluse tuvastamise näited
Erinevate liiklusstsenaariumite näited aitavad teil mõista teie auto tuvastussüsteemide teatud piiranguid. Tegelikud olukorrad on sageli palju keerulisemad kui käesolevas kasutusjuhendis toodud illustreerivad1 näited.
Vaateväljast puuduvate objektide ja hilinenud tuvastamine
Teie auto ümbruse erinevad tuvastussüsteemid on staatilised, oma piiratud ulatuse ja vaateväljaga. Kui midagi siseneb tuvastustsooni ebatavalise nurga all, suurel kiirusel või autole väga lähedal, võib see põhjustada kohest reageerimist. See vähendab ohutusvaru võrreldes olukorraga, kus on võimalik varasem tuvastamine.
Oluline
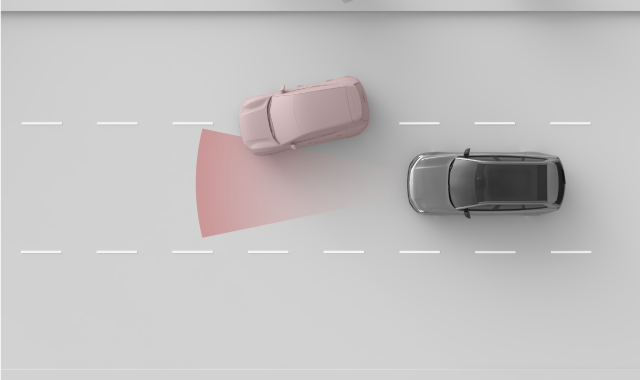
Sõiduraja paigutus ja väikesed sõidukid
Eespool toimuva tuvastamisel eelistatakse pigem sõiduraja keskjoont kui äärejooni. Keskjoont mitte katvad sõidukid võivad jääda tuvastamata. Kuigi see võib juhtuda iga sõidukiga, on risk suurem väikeste sõidukite, näiteks mootorrataste korral. Need võtavad enda alla väiksema osa sõiduraja laiusest ning saavad liikuda selle piires. Pöörake alati erilist tähelepanu igale sõidukile, mis sõidab sõiduraja keskel.
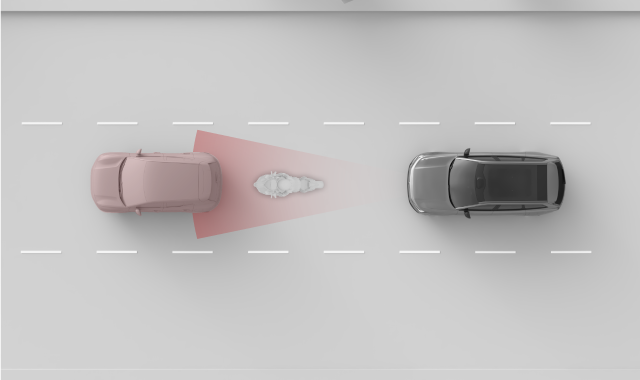
Objektide kuju, suurus ja arv
- Väikseid objekte on raskem kindlaks teha.
- Mida rohkem objekte on, seda raskem on individuaalseid objekte ära tunda.
- Lähestikku asuvaid ja kattuvaid objekte on raskem ära tunda.
- Ebaühtlase kujuga, näiteks ülekatte või väljaulatuvate osadega objekte on raskem ära tunda.
Ees sõitva suure sõiduki lähedus võib takistada väiksema, näiteks mootorratta tuvastamist.
Oluline
Ees sõitev haagis
Teiste teel liikuvate sõidukitega võrreldes on haagiste tuvastamine nende kuju ja kõrguse tõttu sageli vähem usaldusväärne. See kehtib eriti kitsaste haagiste, madalate haagiste ja väga kõrge platvormiga haagiste korral. Seda tüüpi haagistel pole tuvastussüsteemide kaetud kõrgusel sageli piisavalt pinda.
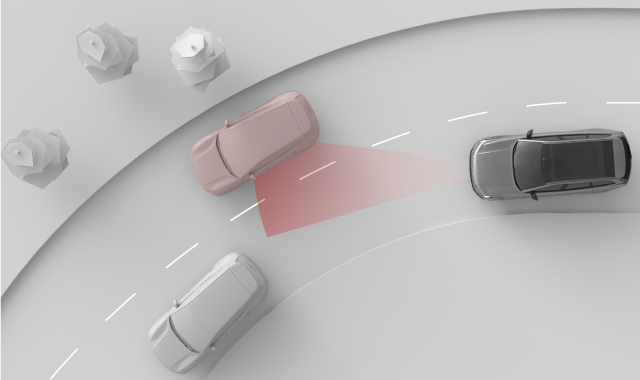
Tee ja taristu
Auto võib teekäänakute tõttu liiklusolukorda valesti tõlgendada. Näiteks võib see sõiduki vaateväljast kaotada või määrata valesti sõidurea, kus sõiduk asub.
Oluline
Teeolud ja erisused
- Järsud käänakud ja teepinna ebatasasused võivad ajutiselt varjata auto ümbruse olulisi elemente, näiteks teisi sõidukeid või teemärgistust.
- Auto võib mittestandardset või ebatavalist tee taristut valesti tuvastada. Näiteks võivad teetööd või ümbersõidud põhjustada vastuolulist või mitmekordset teemärgistust.
- Kulunud teemärgistust või märke võidakse valesti lugeda.