La capacité de votre voiture à comprendre son environnement est obtenue grâce à de nombreux systèmes et types de capteur. L'interprétation par la voiture des données qu'elle recueille contribue à guider son comportement, en particulier pour les fonctions d'aide à la conduite.
| Caméras | Les caméras fonctionnent de la même manière que l'œil humain. Ce qu'elles captent est utilisé à différentes fins, selon la caméra. Par exemple, la caméra frontale supérieure aide la voiture à reconnaître des éléments tels que les panneaux de signalisation et les marquages routiers, tandis que ce que la caméra de stationnement arrière capte s'affiche à l'écran. |
| Radars | Les radars utilisent des ondes radioélectriques pour recueillir des informations sur l'environnement de la voiture. Ils peuvent déterminer la distance des objets et certains aspects de leur mouvement. Ces informations sont essentielles pour de nombreuses fonctions de la voiture. |
| Capteurs de stationnement à ultrasons | Ces capteurs utilisent des ondes sonores pour détecter des objets relativement proches. Ils fonctionnent en envoyant des impulsions ultrasoniques qui peuvent rebondir vers les capteurs lorsqu'elles rencontrent un objet. |
Comment les systèmes fonctionnent-ils ensemble?
Les différents types de détection se complètent. Ils sont parfois utilisés seuls, parfois ensemble.
Important
Limites générales de détection et d'identification
- La voiture ne peut pas toujours réagir à des situations imprévisibles ou étranges. Lorsqu'elle éprouve des difficultés à reconnaître correctement l'environnement ou la circulation, l'efficacité de son intervention est réduite.
- Des dommages à la voiture peuvent avoir une incidence sur les fonctionnalités de détection et connexes. La voiture peut détecter de nombreuses anomalies, mais il se peut qu'elle soit incapable d'en reconnaître toutes. C'est pourquoi il est important de s'assurer que la voiture est en bon état et fonctionne correctement. Si vous pensez qu'il y a toute anomalie ou si vous constatez des dommages sur la voiture, communiquez avec un atelier Volvo agréé.
- Des facteurs et conditions de limitation peuvent coïncider, comme c'est souvent effectivement le cas. Ils peuvent s'accumuler et interagir d'une manière qui entraîne une réponse incorrecte de la voiture.
Limitations à la détection d'obstacles
La détection d'obstacles aide la voiture à identifier certains objets immobiles et mobiles. Ces objets peuvent être d'autres utilisateurs de la route, comme des piétons ou d'autres véhicules, animaux, barrières ou autres objets. S'ils se trouvent dans la trajectoire de la voiture, ou proche de celle-ci, ils peuvent poser un risque de collision. Selon les circonstances, la voiture peut être capable d'avertir ou d'intervenir si l'objet est identifié de façon précise. Pour tous les types d'objets que la voiture peut identifier, il y a plusieurs facteurs qui empêchent une identification exacte. Voici des exemples de facteurs de limitation, situation et événements :
- Objets et utilisateurs de la route étroitement espacés, se chevauchant ou partiellement bloqués.
- Objets et utilisateurs de la route qui se fondent dans l'arrière-plan.
- Objets et utilisateurs de la route qui se déplacent ou accélèrent particulièrement rapidement.
- Véhicules non courants, comme les vélos à position allongée, les moissonneuses-batteuses ou les remorques ayant des charges aux formes inhabituelles.
- Vélos d'un type ou d'une dimension différente à un vélo pour adulte régulier.
- Nouveaux modes de transport.
- Vêtements ou objets transportés qui altèrent la silhouette d'un piéton.
- Piétons ayant une taille inférieure à 80 cm (32 pouces).
- Obstacles en angle de manière à créer une silhouette inconnue.
- Dimension et vitesse des animaux. Les chats et chiens sont souvent trop petits pour être identifiés de façon sûre.
Remarque
Exemple de détection de la circulation
Les exemples suivants de différents scénarios de circulation peuvent vous aider à comprendre certaines des limites des systèmes de détection de votre voiture. Les scénarios dans le monde réel sont souvent plus complexes que les exemples illustratifs1 suivants de ce manuel.
Hors champ de vision et détection tardive
Les diverses zones de détection autour de votre voiture sont statiques, chacune avec une portée et un champ de vision limités. Si quelque chose entre dans une zone de détection à un angle inhabituel, à haute vitesse ou très proche de votre voiture, il peut entraîner une réponse rapide. Ceci réduit les marges de sécurité en comparaison à une situation dans laquelle une détection précoce était possible.
Important
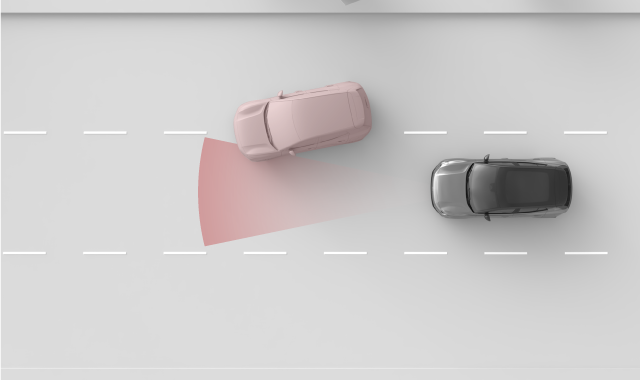
Dispositions des voies et petits véhicules
Pour la détection avant, le milieu de la voie est plus favorable en comparaison à ses parties plus externes. Les véhicules pourraient ne pas être détectés s'ils n'occupent pas le milieu de la voie. Bien que cela puisse se produire avec n'importe quel véhicule, le risque est plus élevé pour les plus petits, comme les motocyclettes. Ils prennent moins d'espace de la largeur de la voie et peuvent se déplacer plus dans la voie. Prêtez toujours une attention particulière à n'importe quel véhicule ne conduisant pas dans le milieu de la voie.
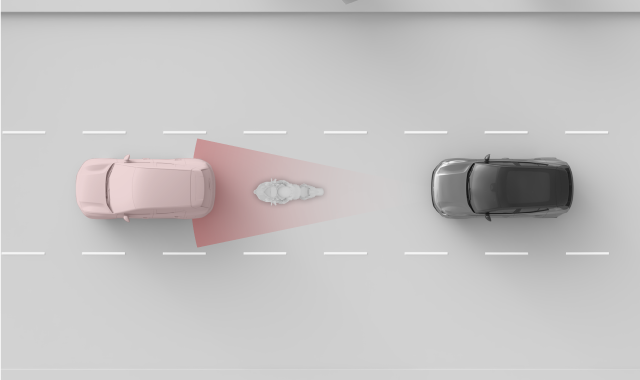
Forme, dimension et nombre des objets
- Les objets plus petits sont plus difficiles à identifier.
- Plus il y a d'objets et plus il est difficile d'en identifier des individuels.
- Les objets proches l'un de l'autre qui se chevauchent sont plus difficiles à identifier.
- Les objets ayant des formes non uniformes, comme ceux ayant un surplomb ou des pièces qui ressortent, sont difficiles à identifier.
La présence d'un grand véhicule à l'avant peut rendre difficile la détection d'un véhicule plus petit, comme une moto.
Important
Remorque à l'avant
En comparaison avec beaucoup d'autres véhicules sur la route, la détection des remorques est souvent moins fiable en raison de leur forme et hauteur. Ceci s'applique, en particulier, aux remorques minces, aux remorques basses et aux remorques avec des plateformes de chargement très hautes. Ces types de remorque n'ont souvent pas suffisamment de superficies à la hauteur où les systèmes de détection avant se concentrent.
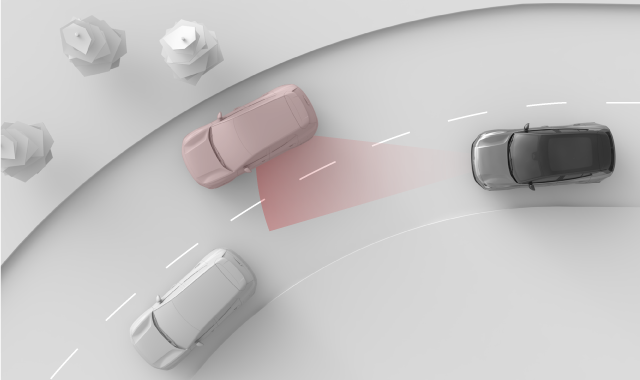
Route et infrastructure
Les virages de la route peuvent fausser l'interprétation de l'état de la circulation par la voiture. Par exemple, elle peut perdre la trace d'un véhicule ou se tromper sur la voie dans laquelle se trouve le véhicule qui la précède.
Important
État de la route et irrégularités
- Les angles étroits et les bosses sur la route peuvent obscurcir temporairement des parties importantes des alentours de la voiture, comme d'autres véhicules ou des marques sur la chaussée.
- Une infrastructure non standard ou inhabituelle pourrait ne pas être identifiée correctement par la voiture. Par exemple, des travaux routiers ou des déviations de circulation peuvent entraîner des conflits ou des séries multiples de marquages routiers.
- Les marques ou symboles sur la chaussée usés pourraient ne pas être identifiés correctement.