Su automóvil interpreta su entorno a través de diferentes sensores y sistemas. La interpretación del automóvil de los datos que obtiene condiciona su comportamiento, especialmente en el caso de las funciones de apoyo a la conducción.
| Cámaras | Las cámaras funcionan de forma similar al ojo humano. La información que capturan se utiliza con diferentes fines, en función de cada cámara. Por ejemplo, la cámara superior orientada hacia delante ayuda al automóvil a identificar elementos como señales de tráfico o líneas de la carretera, mientras que lo que captura la cámara de aparcamiento trasera aparece en la pantalla central. |
| Radares | Los radares utilizan ondas de radio para obtener información sobre el entorno del automóvil. Pueden identificar la distancia hasta objetos y determinados aspectos de su movimiento. Esta información es esencial para muchas prestaciones del automóvil. |
| Sensores de aparcamiento | Estos sensores utilizan ondas acústicas para detectar objetos relativamente cercanos. Funcionan enviando impulsos ultrasónidos que pueden rebotar hacia el sensor al toparse con un objeto. |
Interacción de los sistemas
Los diferentes tipos de detección se complementan. A veces se utilizan solos y a veces juntos.
Importante
Limitaciones generales a la detección y la identificación
- El automóvil no siempre puede gestionar situaciones imprevisibles o extrañas. Si el automóvil tiene dificultades para identificar correctamente el entorno o la situación del tráfico, la precisión de su respuesta se ve afectada.
- Los daños en el automóvil pueden afectar a la detección y las funciones que la utilizan. El automóvil puede identificar muchos fallos, pero no todos. Por eso es importante asegurarse de que el automóvil esté en buen estado y funcione correctamente. Póngase en contacto con un taller Volvo autorizado si sospecha de un posible fallo o si observa daños en el automóvil.
- Los factores limitadores y las condiciones pueden coincidir, y muchas veces lo hacen. En función de cómo se sumen y se combinen, pueden provocar una respuesta incorrecta del automóvil.
Limitaciones que afectan a la detección de obstáculos
El sistema de detección de obstáculos ayuda al automóvil a identificar determinados objetos móviles y estáticos. Estos objetos pueden ser otros usuarios de la carretera, como peatones u otros vehículos, animales, barreras u otros objetos. Si están dentro o cerca de la trayectoria del automóvil, pueden generar un riesgo de colisión. En función de las circunstancias, el automóvil puede ser capaz de alertar o intervenir si el objeto no se identifica correctamente. Sin embargo, hay muchos factores que pueden impedir una identificación precisa de los diferentes tipos de objetos que el automóvil puede detectar. Estos son algunos factores, situaciones y eventos que pueden limitar la identificación:
- Objetos y usuarios de la carretera con poca separación entre sí, solapados o parcialmente bloqueados.
- Objetos y usuarios de la carretera que se confunden con el fondo.
- Objetos y usuarios de la carretera que se mueven o aceleran especialmente rápido.
- Vehículos poco habituales, como triciclos, cosechadoras o remolques con cargas poco habituales.
- Bicicletas de un tipo o un tamaño diferente de una bicicleta de adulto convencional.
- Nuevos medios de transporte.
- Prendas de ropa u objetos transportados que alteran el perfil de un peatón.
- Peatones de una estatura inferior a 80 cm (32 pulgadas).
- Obstáculos en un ángulo que genera un perfil desconocido.
- Tamaño y velocidad de los animales. Algunos perros o gatos son demasiado pequeños para permitir una identificación fiable.
Nota
Ejemplos de detección de tráfico
Las siguientes situaciones de tráfico pueden ayudarle a entender las limitaciones de los sistemas de detección del automóvil. Las situaciones reales a menudo son más complejas que los ejemplos ilustrativos1 de este manual.
Detección tardía y campo de visión
Las diferentes zonas de detección en torno a su automóvil son estáticas y cada una tiene un radio y un campo de acción limitados. Si algo entra en una zona de detección en un ángulo poco habitual, a alta velocidad o muy cerca de su automóvil puede provocar una respuesta rápida. En estos casos los márgenes de seguridad son inferiores a situaciones que permiten una detección con mayor antelación.
Importante
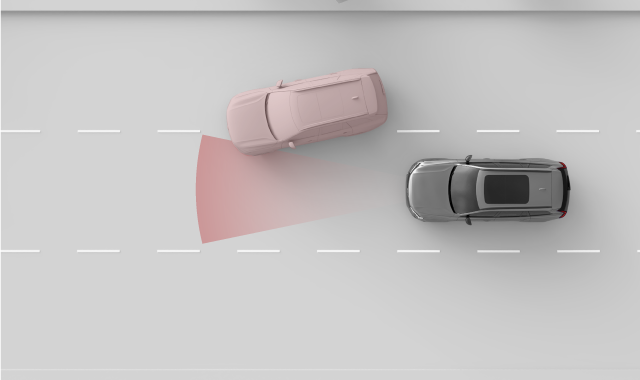
Posición en el carril y vehículos pequeños
Para la detección hacia delante, la parte central del carril es más favorable que las partes exteriores. Un vehículo puede no ser detectado si no ocupa la parte central del carril. Aunque puede ocurrir con cualquier vehículo, el riesgo es superior en el caso de los más pequeños, como motocicletas. Estos vehículos no ocupan tanta anchura del carril y pueden moverse más dentro del carril. Preste siempre atención a los vehículos que no circulan por el medio del carril.
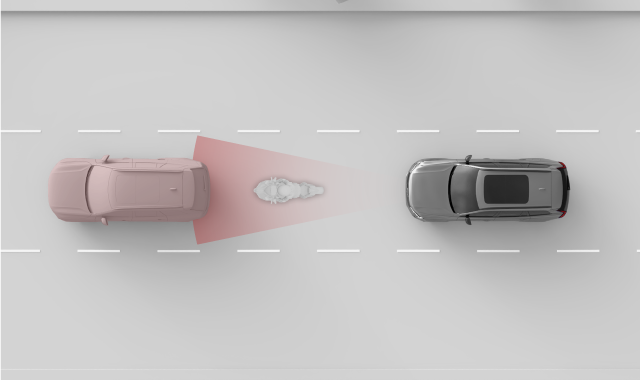
Forma, tamaño y número de objetos
- Los objetos pequeños son más difíciles de identificar.
- Cuantos más objetos, más complicado es identificar objetos concretos.
- Los objetos con poca separación entre sí y que se solapan son más difíciles de identificar.
- Los objetos con formas irregulares, por ejemplo con salientes o voladizos, son más difíciles de identificar.
La presencia de un vehículo grande delante puede dificultar la detección de un vehículo más pequeño, como una motocicleta.
Importante
Remolque delante
En comparación con muchos otros vehículos, la detección de los remolques acostumbra a ser menos fiable, por su forma y su altura. Esto puede ocurrir sobre todo con remolques estrechos, bajos o con plataformas de carga muy altas. Estos tipos de remolques a menudo no tienen una superficie suficiente a la altura hacia la que apuntan los sistemas de detección.
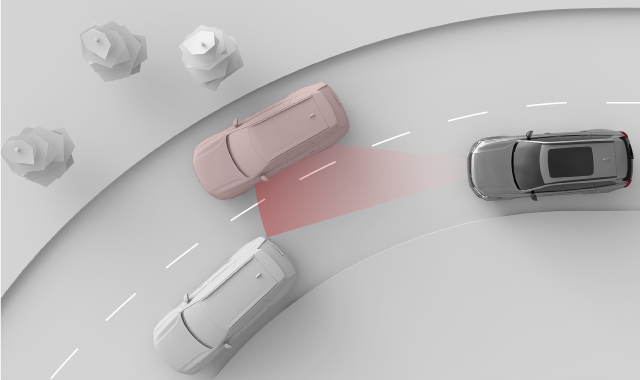
Carretera e infraestructura
Las curvas de la carretera pueden provocar que el automóvil interprete incorrectamente la situación del tráfico. Por ejemplo, puede perder la pista de un vehículo o identificar incorrectamente en qué carril está un vehículo que circula por delante.
Importante
Estado de la carretera e irregularidades
- Unas curvas pronunciadas o la presencia de baches en la carretera pueden ocultar temporalmente partes importantes del entorno del automóvil, como otros vehículos o marcas de la carretera.
- Es posible que el automóvil no identifique correctamente infraestructuras viarias poco habituales o convencionales. Por ejemplo, en caso de obras o desvíos del tráfico tal vez coexistan diferentes tipos de líneas en la carretera.
- Unas marcas o señales de tráfico desgastados tal vez no puedan identificarse correctamente.