Az autó képességét a környezete felfogására sok rendszer és sokféle érzékelő segíti. Az autó által gyűjtött adatok autó általi értelmezése segíti a viselkedését, főként a vezetőtámogatási funkciókat.
| Kamerák | A kamerák az emberi szemhez hasonlóan működnek. Kamerától függően különböző célokra lesznek felhasználva, amit rögzítenek. Például a felső előrefelé néző kamera segíti az autót az olyan tárgyak felismerésében mint a jelzőtáblák és útburkolati jelek, míg a hátsó parkolókamera által rögzítettek megjelennek a kijelzőn. |
| Radarok | A radarok rádióhullámokat használnak, hogy információt gyűjtsenek az autó környezetéről. Meg tudják határozni a tárgyak távolságát és a mozgásuk bizonyos vonatkozásait. Ezek az információk az autó sok funkciójához elengedhetetlenek. |
| Ultrahangos parkolási érzékelő | Ezek az érzékelők hanghullámokat használnak a viszonylag közeli tárgyak érzékeléséhez. Ultrahang impulzusokat küldenek, amelyek visszaverődhetnek az érzékelőhöz, amikor egy tárggyal találkoznak. |
Hogyan működnek együtt a rendszerek
A különböző észlelési típusok kiegészítik egymást. Néha magukban használja az autó ezeket, néha együtt.
Fontos
Általános észlelési és a felismerési korlátok
- Az autó nem tudja mindig kezelni a kiszámíthatatlan vagy szokatlan helyzeteket. Amikor az autó nehéznek tartja a környezet vagy a forgalmi helyzet helyes felismerését, akkor ez kihat a reagálás pontosságára.
- Az autó sérülése kihathat az észlelésre és az arra épülő funkciókra. Sok hibát felismerhet az autó, de előfordulhat, hogy néhányat nem képes maga felismerni. Ezért fontos, hogy meggyőződjön arról, hogy az autó jó állapotban van és jól működik. Forduljon egy hivatalos Volvo műhelyhez, ha arra gyanakodik, hogy valami hiba fennáll, vagy ha sérülést vesz észre az autón.
- A korlátozó tényezők és feltételek egybeeshetnek, és gyakran egybe is esnek. Összeadódhatnak és kölcsönhatásba léphetnek egymással olyan módon, amely az autó helytelen reagálását eredményezheti.
Az akadályérzékelés korlátai
Az akadályérzékelés segíti az autót bizonyos álló és mozgó akadályok felismerésében. Ezek az akadályok lehetnek más közlekedők, például gyalogosok vagy más járművek, állatok, korlátok vagy más tárgyak. Ha az autó haladási útvonalán vagy annak közelében vannak, ütközésveszélyt jelenthetnek. A körülményektől függően az autó lehet, hogy tud figyelmeztetni vagy közbe tud avatkozni, ha az akadályt pontosan azonosította. Az autó által felismerhető minden típusú akadály esetében számos olyan tényező van, amely megakadályozhatja a pontos azonosítást. Korlátozó tényezőkre, helyzetekre és eseményekre példák a következők:
- Szorosan egymás mellett elhelyezkedő, egymást takaró vagy részben eltorlaszolt tárgyak és közlekedők.
- A háttérbe beolvadó tárgyak és közlekedők.
- Nagyon gyorsan mozgó vagy gyorsító tárgyak és közlekedők.
- Szokatlan járművek, például fekvőbiciklik, kombájnok vagy szabálytalan alakú rakományt szállító utánfutók.
- A hagyományos felnőtt kerékpárokhoz képest eltérő típusú vagy méretű kerékpárok.
- Új közlekedési módok.
- A gyalogos sziluettjét megváltoztató ruházat vagy szállított tárgyak.
- 80 cm (32 hüvelyk) magasságnál alacsonyabb gyalogosok.
- Akadályok, amelyek olyan szögben állnak, hogy egy ismeretlen körvonalat hoznak létre.
- Állatok mérete és sebessége. A macskák és kutyák gyakran túl kicsik a megbízható felismeréshez.
Megjegyzés
Példák a forgalom észlelésére
A különböző forgalmi helyzetek alábbi példái segíthetnek Önnek megérteni az autó észlelési rendszerének korlátait. A valóságos helyzetek gyakran összetettebbek, mint az ebben az útmutatóban ábrázolt1 alábbi példák.
Látómezőn kívüli és kései észlelés
Az autón körben elhelyezkedő észlelési zónák statikusak, mindegyiküknek korlátozott a hatótávolsága és a látómezeje. Ha valami szokatlan szögben, nagy sebességgel, vagy az autójához nagyon közel lép be egy észlelési zónába, ez gyors reagálást válthat ki. Ez csökkenti a biztonsági mozgásteret egy olyan helyzethez képest, amelyben a korábbi észlelés lehetséges.
Fontos
Elhelyezkedés a sávban és kis járművek
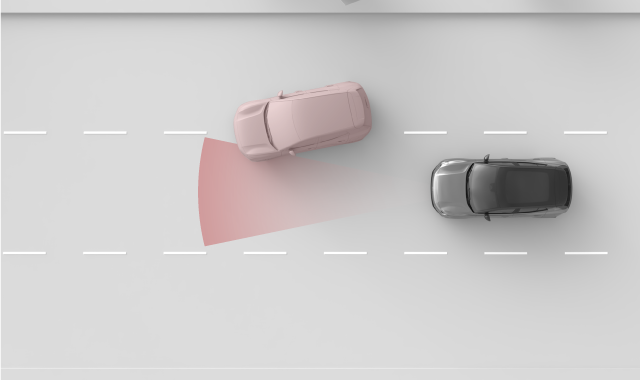
Az előre irányuló észleléskor a sáv közepe előnyben részesül a külső részeihez képest. Ha a járművek nem foglalják el a sáv közepét, észrevétlenek maradhatnak. Bár ez megtörténhet bármilyen járművel, a kockázat nagyobb kisebb járművek, például motorkerékpárok esetén. A sáv szélességéből kevesebbet foglalnak el és többet tudnak mozogni a sávon belül. Mindig fordítson kiemelt figyelmet azokra a járművekre, amelyek nem a sáv közepén haladnak.
A tárgyak formája, mérete és száma
- A kis tárgyakat nehezebb felismerni.
- Minél több tárgy van, annál nehezebb az egyes tárgyakat felismerni.
- Az egymáshoz közel lévő vagy egymást takaró tárgyakat nehezebb felismerni.
- Nehezebb felismerni a nem egységes formájú tárgyakat, például amelyeknek túlnyúló vagy kiálló részeik vannak.
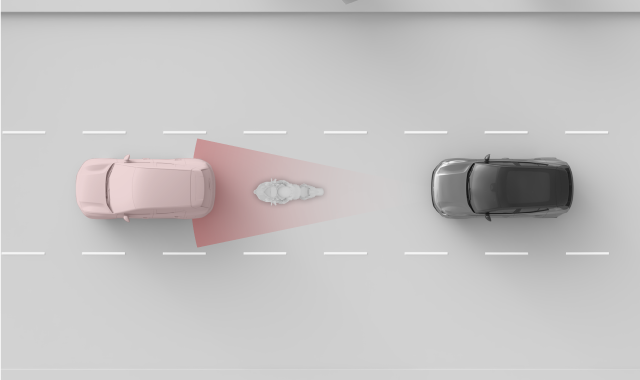
Egy nagy jármű jelenléte egy kisebb jármű előtt megnehezítheti a kisebb jármű, például egy motorkerékpár felismerését.
Fontos
Elöl haladó utánfutó
Az úton közlekedő sok más járműhöz képest az utánfutók észlelése kevésbé megbízható a formájuk és magasságuk miatt. Ez főleg a keskeny, alacsony és a nagyon magas rakodófelületű utánfutókra érvényes. Az ilyen típusú utánfutóknak gyakran nincs elég nagy külső felületük az előre irányuló észlelési rendszer fókuszának magasságában.
Utak és létesítmények
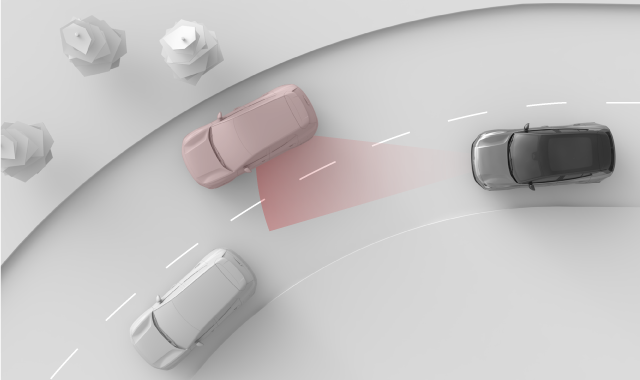
A kanyarok azt okozhatják, hogy az autó félreértelmezi a forgalmi helyzetet. Például, szem elől téveszthet egy járművet vagy félreértelmezheti, hogy melyik sávban van az elöl haladó jármű.
Fontos
Útállapot és egyenetlenségek
- Az éles kanyarok és a bukkanók az úton átmenetileg akadályozhatják az autó környezetének fontos részeit, például másik járműveket vagy az útburkolati jeleket.
- A szokásos és szokatlan közúti létesítményeket lehet, hogy helytelenül ismeri fel az autó. Például az útépítési munkák vagy forgalomelterelések egymásnak ellentmondó vagy többszörös útburkolati jeleket eredményezhetnek.
- A kopott útburkolati jelek vagy jelzések felismerése téves lehet.