Your car's ability to understand its surroundings is achieved through many systems and types of sensors. The car's interpretation of the data it collects helps inform its behaviour, especially for driver support features.
| Cameras | Cameras work similarly to the human eye. What they capture is used for different purposes, which depends on the camera. For example, the upper front-facing camera helps the car identify things such as traffic signs and road markings, whereas what the rear parking camera captures appears in the display. |
| Radars | Radars use radio waves to collect information about the car's surroundings. They can identify the distance to objects and certain aspects of their movement. This information is essential for many features in the car. |
| Ultrasonic parking sensors | These sensors use sound waves to detect relatively close objects. They work by sending out ultrasound pulses that can bounce back to the sensors when they encounter an object. |
How systems work together
The different detection types complement each other. They are sometimes used on their own and sometimes together.
Important
General detection and identification limitations
- The car can't always handle unpredictable or strange situations. When the car finds it difficult to correctly identify the environment or traffic situation, the accuracy of its response is affected.
- Damage to the car can affect detection and reliant features. Many faults can be identified by the car, but some may not be possible to self-identify. This is why it's important to make sure that the car is in good condition and working order. Contact an authorised Volvo workshop if you suspect there are any faults or if you notice damage to the car.
- Limiting factors and conditions can, and frequently do, coincide. They can compound and interact in ways that amount to an incorrect response from the car.
Obstacle detection limitations
Obstacle detection helps the car identify certain stationary and moving objects. These objects can be other road users, such as pedestrians or other vehicles, animals, barriers or other objects. If they are in or close to the car's driving path, they could pose a collision risk. Depending on the circumstances, the car might be able to warn or intervene if the object is accurately identified. For all types of objects the car can identify, there are many factors that can prevent accurate identification. Examples of limiting factors, situations and events include:
- Closely spaced, overlapping or partially blocked objects and road users.
- Objects and road users that blend in with the background.
- Objects and road users that move or accelerate particularly fast.
- Uncommon vehicles, such as recumbent bicycles, combine harvesters or trailers with oddly-shaped loads.
- Bicycles of a different type or size compared to a regular adult bicycle.
- New modes of transportation.
- Clothing or carried objects that alter the silhouette of a pedestrian.
- Pedestrians shorter than 80 cm (32 inches).
- Obstacles angled in ways that create an unknown silhouette.
- Size and speed of animals. Cats and dogs are often too small to be reliably identified.
Note
Traffic detection examples
The following examples of different traffic scenarios can help you understand some of the limitations of your car's detection systems. Real-world scenarios are often more complex than the following illustrative1 examples in this manual.
Out of view and late detection
The various detection zones around your car are static, each with a limited range and field of view. If something enters a detection zone at an unusual angle, at high speed or very close to your car, it can cause a rapid response. This reduces safety margins compared to a situation in which earlier detection was possible.
Important
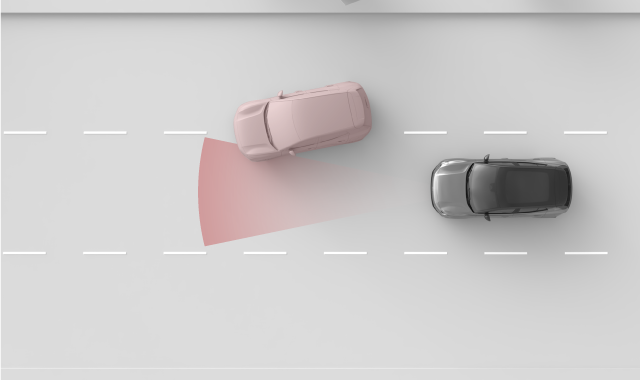
Lane placement and small vehicles
For forward detection, the middle of the lane is more favourable compared to its outer parts. Vehicles can go undetected if they don't occupy the middle of the lane. While this can happen for any vehicle, the risk is higher for small ones, such as motorcycles. They take up less of the lane's width and can move about more within the lane. Always pay extra attention to any vehicle not driving in the middle of the lane.
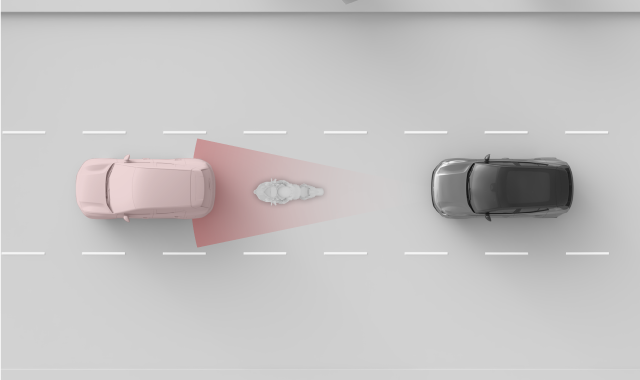
Shape, size and number of objects
- Small objects are harder to identify.
- The more objects, the harder it is to identify individual ones.
- Objects close together that overlap are harder to identify.
- Objects with non-uniform shapes, such as having overhangs or parts that stick out, are harder to identify.
The presence of a large vehicle in front can make it difficult to identify a smaller one, such as a motorcycle.
Important
Trailer in front
Compared to many other vehicles on the road, the detection of trailers is often less reliable due to their shape and height. This applies, in particular, to slim trailers, low trailers and trailers with very high loading beds. These types of trailers often don't have enough surface area at the height where forward detection systems focus.
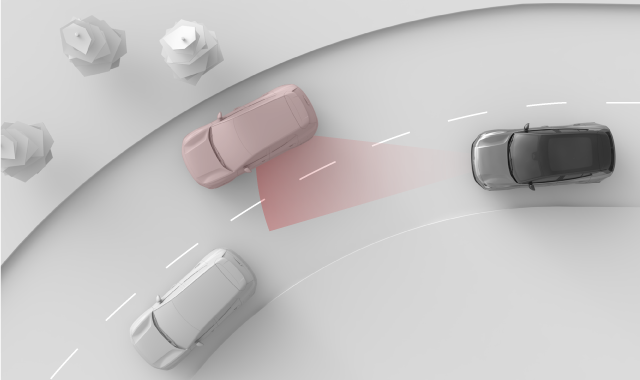
Road and infrastructure
Bends in the road can cause the car to misinterpret the traffic situation. For example, it can lose track of a vehicle or misidentify which lane a vehicle ahead is in.
Important
Road condition and irregularities
- Sharp bends and bumps in the road can temporarily obscure important parts of the car's surroundings, such as other vehicles or road markings.
- Non-standard or unusual road infrastructure might not be correctly identified by the car. For example, road work or traffic diversions can result in conflicting or multiple sets of road markings.
- Worn road markings or signs might not be correctly identified.