周囲の状況を把握するお車の能力は、多くのシステムと多くの種類のセンサーによって達成されます。 車両の収集したデータの解釈は、車両の挙動(特に運転者サポート機能の挙動)に関する情報の伝達に役立ちます。
| カメラ | カメラは人間の目と同じように機能します。 カメラが捉えたものは、カメラに応じてさまざまな目的に使用されます。 例えば、上部の前方監視カメラは、車両が交通標識や路面標示などを識別するのに役立ち、リアパーキングカメラが捉えたものはディスプレイに表示されます。 |
| レーダー | レーダーは電波を使用して車両の周辺に関する情報を収集します。 レーダーは物体までの距離および物体の特定方向への動きを識別することができます。 この情報は車両の多くの機能に不可欠です。 |
| 超音波パーキングセンサー | これらのセンサーは、音波を使用して比較的近くにある物体を検知します。 物体に当たるとセンサーに跳ね返ってくる超音波パルスを発信することで機能します。 |
システムが連携する仕組み
さまざまな検知タイプは互いに補完し合います。 これらは単独で使用されることもあれば、併用されることもあります。
重要
一般的な検知と識別の限界
- 車両は予測不可能な、または一般的でない状況にかならずしも対応できるとは限りません。 車両が環境や交通状況を正しく認識することが困難な場合、車両の応答精度に影響が生じます。
- 車両の損傷は、それに依存する機能や検知に影響を与える可能性があります。 車両は多くの故障を特定できますが、中には特定できないものもあります。 そのため、車両の状態が良好で、正常に動作することを確認することが重要です。 故障が疑われる場合や車両の損傷に気づいた場合は、ボルボ指定のサービス工場にご連絡ください。
- 制限要因と条件は同時に発生することがよくあります。 これらが複合的に影響し合い、車両が誤った反応を示すことがあります。
障害物検知の限界
障害物検知は、車両が特定の静止物体と移動物体を識別するのに役立ちます。 これらの物体には、道路利用者(歩行者や他車両など)、動物、障壁などの物体が含まれます。 これらの物体が車両の走行経路内またはその近くにある場合、衝突の危険が生じる可能性があります。 物体が正確に識別された場合、車両は状況に応じて警告または介入できる場合があります。 車両が識別できるあらゆる種類の物体において、正確な識別を妨げる多数の要因があります。 障害物検知を制限する要因、状況、事象には、次のような例が含まれます。
- 間隔が狭い、重なっている、または部分的に遮られている物体や道路利用者。
- 背景に溶け込んでいる物体や道路利用者。
- 特に速い速度で移動または加速する物体や道路利用者。
- リカンベント自転車、コンバインハーベスター、異形の荷物を積載したトレーラーなど、一般的でない車両。
- 通常の大人用自転車とは種類や大きさが異なる自転車。
- 新しい形式の交通手段。
- 歩行者のシルエットを変える衣服や携帯品。
- 身長が80 cm (32インチ)未満の歩行者。
- 未知のシルエットを生み出す角度の障害物。
- 動物の大きさと速度。 犬や猫は小さすぎるため、確実に識別されないことがよくあります。
ノート
交通検知の例
次のさまざまな交通シナリオの例は、お車の検知システムの限界の一部を理解するのに役立ちます。 実際のシナリオは、本マニュアルに記載されている以下の1例よりも複雑な場合が多くあります。
視野外の物体および検知の遅延
お車の周囲のさまざまな検知ゾーンは固定で、それぞれの範囲と視野は限られています。 物体が通常と異なる角度や高速で検知ゾーンに入った場合、またはお車に非常に近い検知ゾーンに入った場合、急激な反応が起こることがあります。 この場合、早期検知が可能な状況に比べて安全性が低くなります。
重要
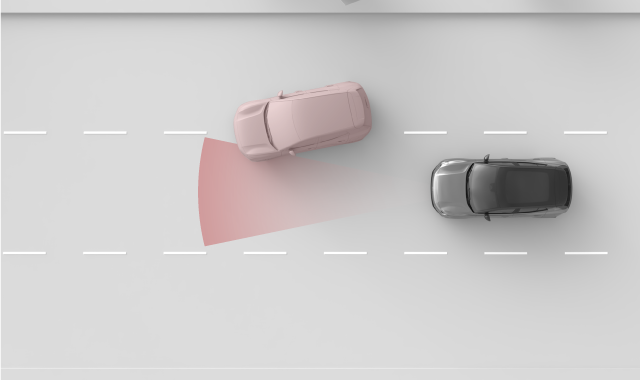
車線内の位置および小型車両
前方検知の場合、車線の外側よりも中央の方が有利です。 車両が車線の中央を走行していない場合、その車両は検知されない可能性があります。 これはどの車両でも発生する可能性がありますが、小型車両(オートバイなど)ではリスクが高くなります。 小型車両は車線内で占める幅が狭く、車線内をより自由に移動することができます。 車線の中央を走行していない車両には、つねに細心の注意を払ってください。
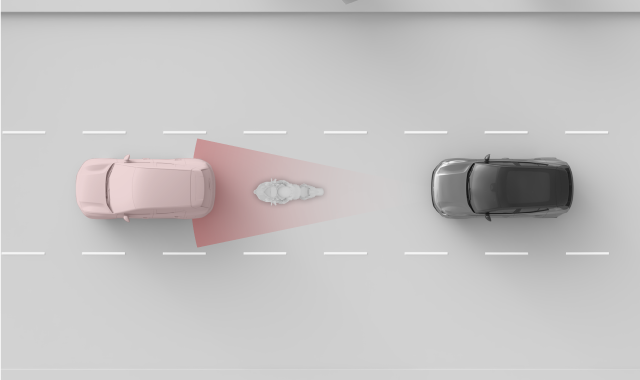
物体の形状、大きさ、数
- 小さな物体は識別が困難です。
- 物体の数が多いほど、個々の物体を識別するのが難しくなります。
- 近接して重なり合った物体は識別が困難です。
- 形状が不均一な物体(一部が突出した物体など)は識別が困難です。
前方に大型車両があると、それよりも小型の車両(オートバイなど)を識別しにくくなることがあります。
重要
前方のトレーラー
路上のほかの多くの車両と比較して、トレーラーの検知は、その形状と高さのため、多くの場合信頼性が低くなります。 これは、特に細身のトレーラー、低いトレーラー、荷台が非常に高いトレーラーに当てはまります。 多くの場合、このようなタイプのトレーラーには、前方検知システムが焦点を合わせる高さに十分な表面積がありません。
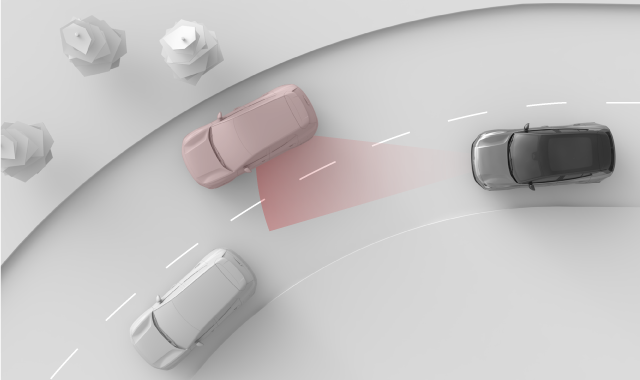
道路とインフラ
道路がカーブしていると、車両が交通状況を誤って解釈することがあります。 例えば、車両を見失ったり、前方車両が走行している車線を誤認したりする可能性があります。
重要
道路の状態と不規則性
- 急カーブや道路の段差によって、他の車両や道路標識など、車両の周囲の重要な部分が一時的に見えなくなることがあります。
- 非標準的な、または一般的でない道路インフラは、車両が正しく識別できないことがあります。 例えば、道路工事や迂回が、路面標示の矛盾や競合を引き起こすことがあります。
- 摩耗した路面標示や標識は正しく識別されないことがあります。