パークアシスト・パイロット(PAP)* - 制限事項
パークアシスト・パイロット(PAP – Park Assist Pilot)は、まず十分なスペースがあるかを確認し、その後ステアリングホイールを操作して、運転者が車両を一定のスペースに駐車する作業をサポートします。
以下の場合、PAPは動作を停止します。
PAP の手順が停止するとディスプレイテキストが表示されます。
ノート
センサーが泥、氷、雪などに覆われているときは、センサーの機能が低下し、誤作動する場合があります。
重要
状況によっては、PAPが駐車スペースを見つけることができない場合があります。システムが使用するのと同じ超音波周波数を発信している外部サウンドソースによって、センサーが干渉を受けることがその理由の一つとして考えられます。
例えば、車のホーン、濡れたアスファルトの路面でのタイヤの音、エアブレーキ、およびオートバイの排気音などです。
注意事項
パークアシスト・パイロットは、補助機能に過ぎず、失敗のない全自動の機能ではないことを忘れないでください。したがって、運転者はいつでも介入できるように準備しておかなければなりません。他にも、駐車するときに留意しておかなければならないことがいくつかあります。
- PAPは、駐車されている車両の現在位置を基準にアシスト機能を開始します。他の車両が正しく駐車されていないと、車両のタイヤおよびホイールリムを縁石で損傷するおそれがあります。
- PAPは直線道路での駐車を想定しています。道路の急カーブや曲がり角での駐車は想定されていません。このため、PAPが駐車スペースの広さを測定するときには、車両が駐車スペースと平行になっていることを確認してください。
- 道幅の狭い道路では、操舵のための十分なスペースがないため、駐車スペースを見つけられないことがあります。このような場合は、道路の駐車したい側に車両をできるだけ近づけて運転すると、システムはスペースを見つけやすくなります。
- アシスト機能操作中には、車両の前部が対向車の方向に動く可能性があることにご注意してください。
- センサーの検知エリアより高い場所にある物体は、アシスト機能操作に必要な計算を行うときに考慮されません。このため、PAPが駐車スペースに対してステアリングを切るタイミングが早くなりすぎることがあります。したがって、このような駐車スペースへの駐車は避けてください。
- PAPによって選択されたスペースが駐車に適しているかを判断するのは、運転者の責任です。
- 承認タイヤ3 を適切な空気圧で使用してください。タイヤの空気圧はPAPの駐車機能に影響をおよぼします。
- 大雨または雪のときには、システムが駐車スペースを正しく測定できないことがあります。
- タイヤチェーンまたはスペアタイヤを装着している場合には、PAPを使用しないでください。
- 荷物が車両から飛び出している場合、PAPを使用しないでください。
重要
別の承認済みホイールリムおよび/またはタイヤサイズに変更すると、タイヤの円周が変化するおそれがあるため、PAP システムのパラメータの更新が必要になることがあります。ボルボ指定のサービス工場にご相談ください。
メンテナンス
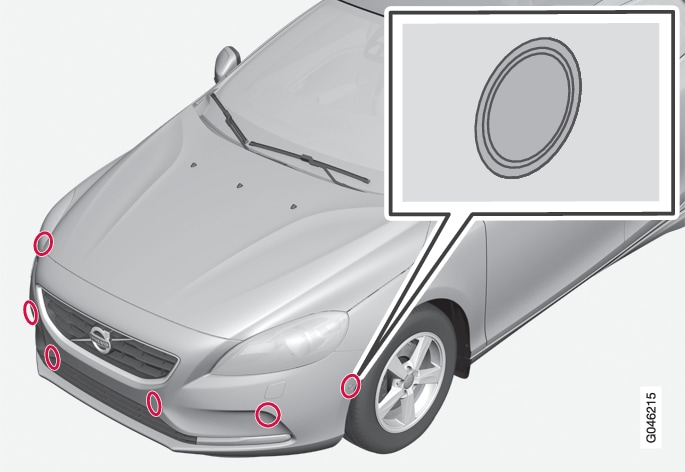
PAP が正常に作動するように、PAPセンサーを水と洗車用洗剤で定期的に清掃してください。