コンバインド・メーター・パネルはエレメントの実行時にシンボル、画像およびテキストを表示します。
ノート
PAP機能はスペースの寸法を測り、車両を操舵します。運転者の役割は以下の通りです。
- 車両周辺に目を配ります
- コンバインド・メーター・パネルに表示される指示に従います
- ギヤシフトを行います(後退/前進)
- 安全速度の制御、維持を行います
- ブレーキを操作し、停止します
エンジンが始動し、以下の条件が満たされると、PAP が起動します。
- PAP 機能の作動中に ABS1 または ESC2 機能が介入してはならない。これらの機能は急勾配や滑りやすい路面などで起動することがあります。詳しくは、フットブレーキおよびスタビリティ・システム ESCのセクションを参照してください。
- トレーラーが車両に接続されていない。
- 速度が50 km/h (30 mph)未満であること。
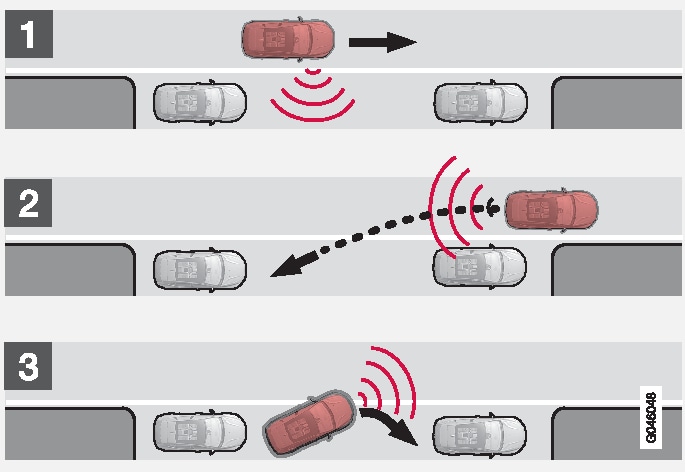
PAP 機能は以下の手順で駐車を行います。
- システムが駐車スペースを探し、スペースを計測します。計測中の車速は30 km/h (20 mph)以下でなければなりません。
- 後退中に、車両は駐車スペースに入るように操舵されます。
- 車両を前進/後退させて、車両を駐車スペースに入れます。