パークアシスト・パイロット(PAP)* - 機能
パークアシスト・パイロット(PAP – Park Assist Pilot)は、まず十分なスペースがあるかを確認し、その後ステアリングホイールを操作して、運転者が車両を一定のスペースに駐車する作業をサポートします。
異なる操作を行う必要がある場合、コンバインド・メーター・パネルはシンボル、グラフィックおよびテキストを使用して、必要な操作を表示します。
ノート
PAP機能により、スペースの計測が行われ、ステアリングホイールが操作されます。運転者はコンバインド・メーター・パネルの指示に従ってギヤを選択(前進/後進)し、速度とブレーキを制御するだけで済みます。
エンジンが始動し、以下の条件が満たされると、PAPが起動します。
- PAP機能の作動中に ABS1 または ESC2 機能が介入してはならない。これらの機能は急勾配や滑りやすい路面などで起動することがあります。詳しくは、フットブレーキおよびスタビリティシステムESCのセクションを参照してください。
- 車両にトレーラーが接続されていないこと。
- 速度が50 km/h以下であること。
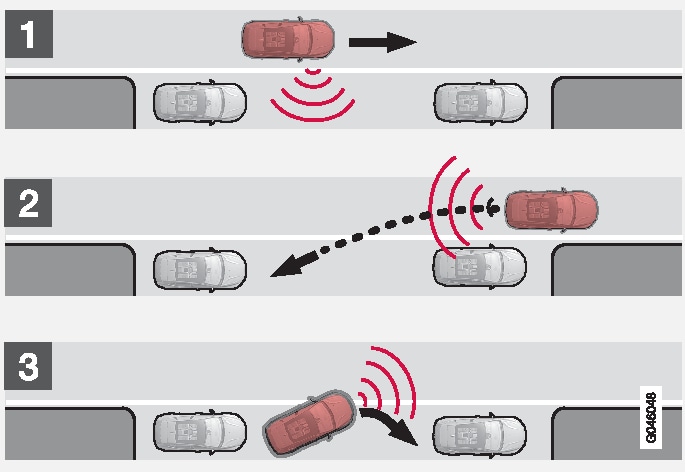
PAP機能は、以下のステップを使用して車庫入れを行います。