パークアシスト・パイロットを使用するさまざまな駐車状況
パークアシスト・パイロット PAP1は以下のようなさまざまな駐車状況で使用することができます。
縦列駐車
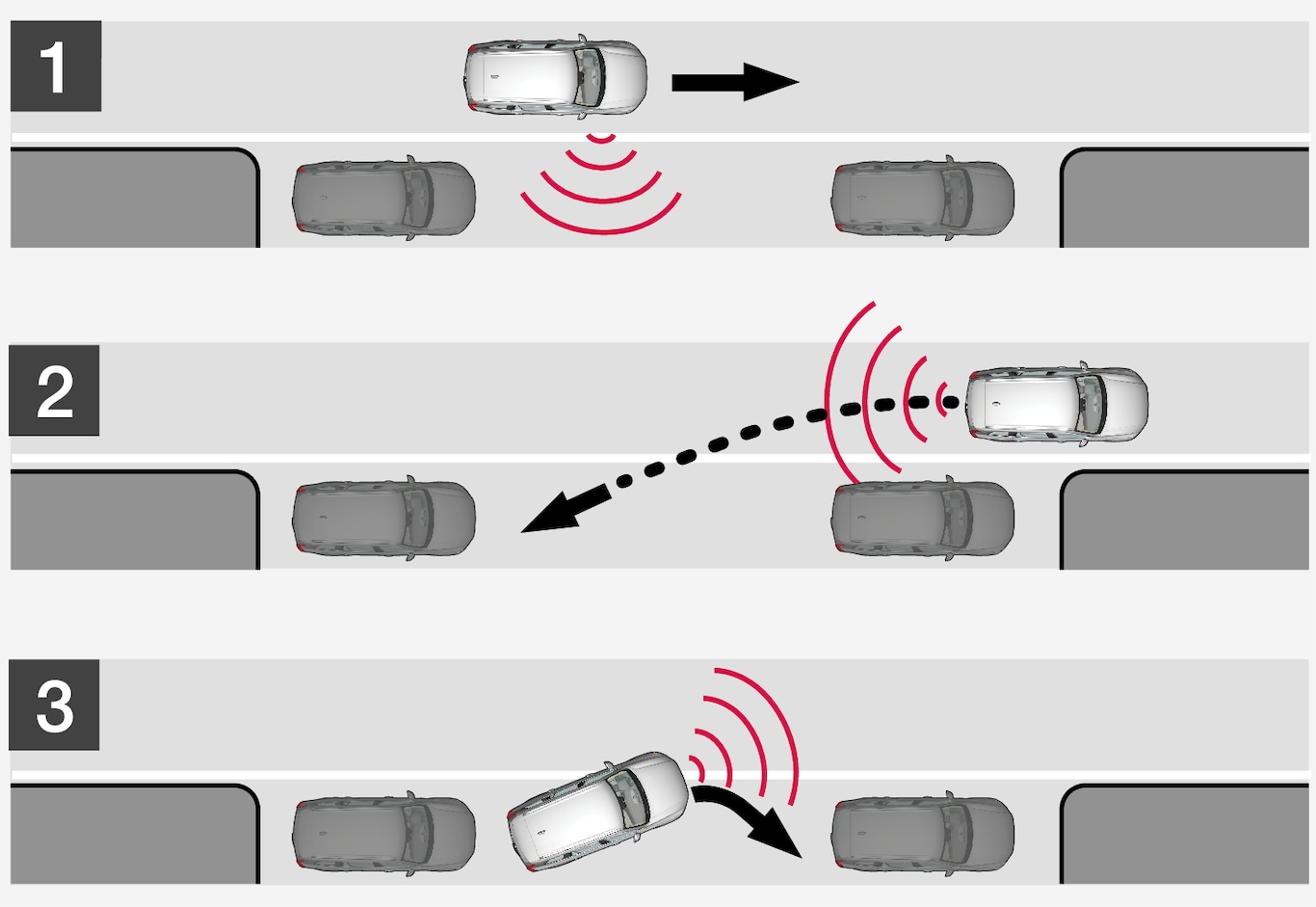
PAP機能は以下の手順で駐車を行います。
- 駐車スペースが特定されて測定されます。
- 後退中に、車両は駐車スペースに入るように操舵されます。
- 車両を前進/後退させて、車両を駐車スペースに入れます。
自動発車 機能を使用することにより、縦列駐車された車両はPAPによる支援を利用して駐車スペースから出ることもできます。「アクティブパークアシスト・パイロットで駐車スペースから出る」の項を参照してください。
並列駐車
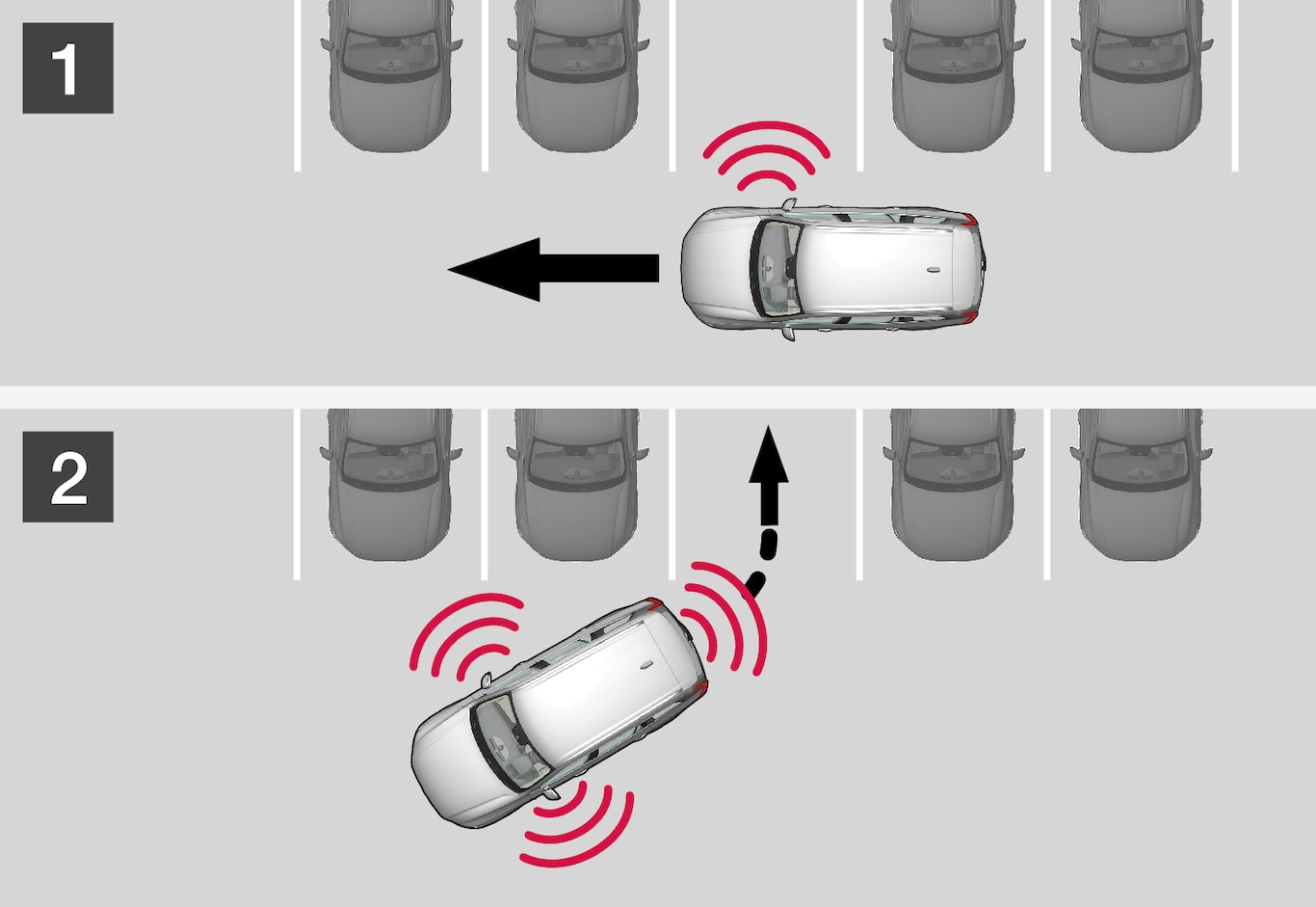
PAP機能は以下の手順で駐車を行います。
- 駐車スペースが特定されて測定されます。
- 車両を駐車スペースへ後退させます。その後車両を前進/後退させて、車両を駐車スペースに入れます。
ノート
並列駐車された車両にPAP 自動発車 機能を使用することはできません。本機能は縦列駐車された車両にのみ使用する必要があります。