前方
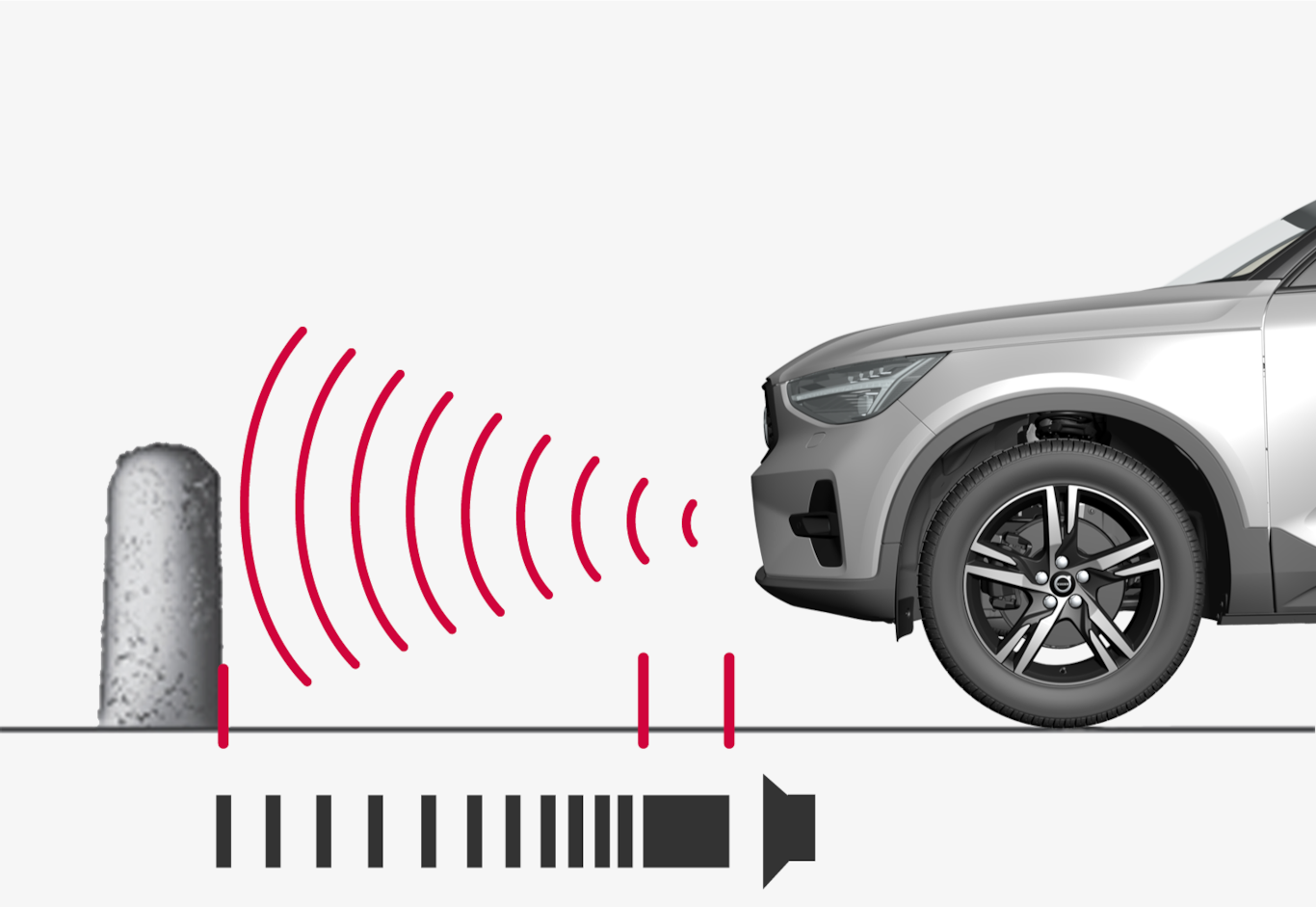
パークアシストのフロントセンサーは、エンジン始動時に自動的に起動します。センサーは速度が10 km/h (6 mph)未満のときに作動します。
測定範囲は車両前方約80 cm (2.5 ft)です。
ノート
パーキングブレーキを使用した場合、またはオートマチックトランスミッション車両でPモードを選択した場合は、パークアシストが非作動状態になります。
重要
補助ライトなど装着時:センサーの邪魔にならないように注意してください。補助ライトを障害物として検知して、誤作動する場合があります。
後方
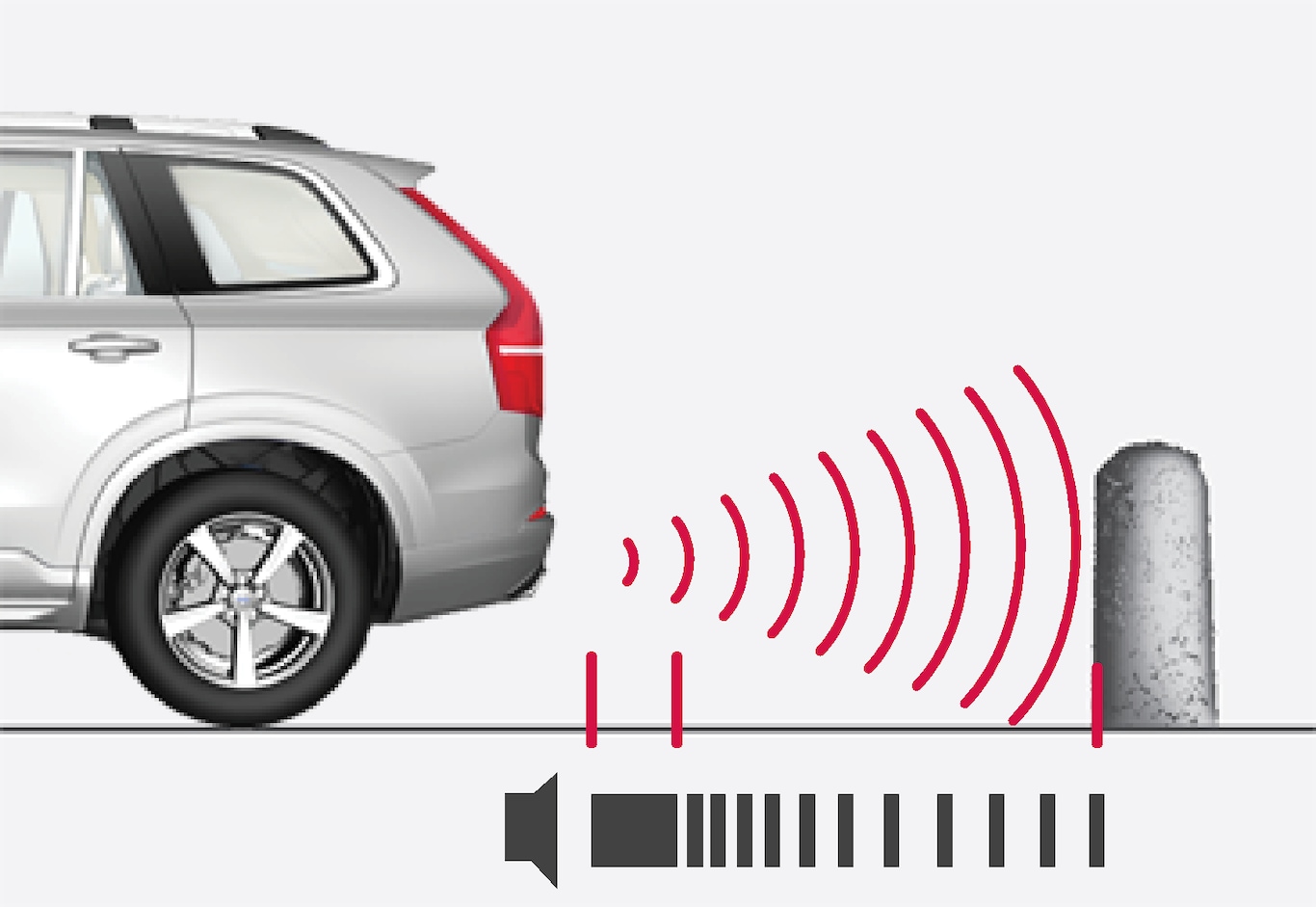
リアセンサーは、ギヤの入っていない状態で車両が後方に動き出した場合やギヤセレクターレバーをリバース位置にしたときに作動します。
測定範囲は車両後方約1.5 m (5 ft)です。
トレーラーが車両の電気系統に接続された状態で後退する場合、後方用パークアシストは自動的に解除されます。
ノート
ボルボ純正トレーラーケーブルを使用せずに、トウバーにトレーラーまたはバイクキャリアを取り付けて後退する際には、センサーがトレーラーやバイクキャリアに反応しないように、パークアシストを手動で解除することが必要になる場合があります。
側方
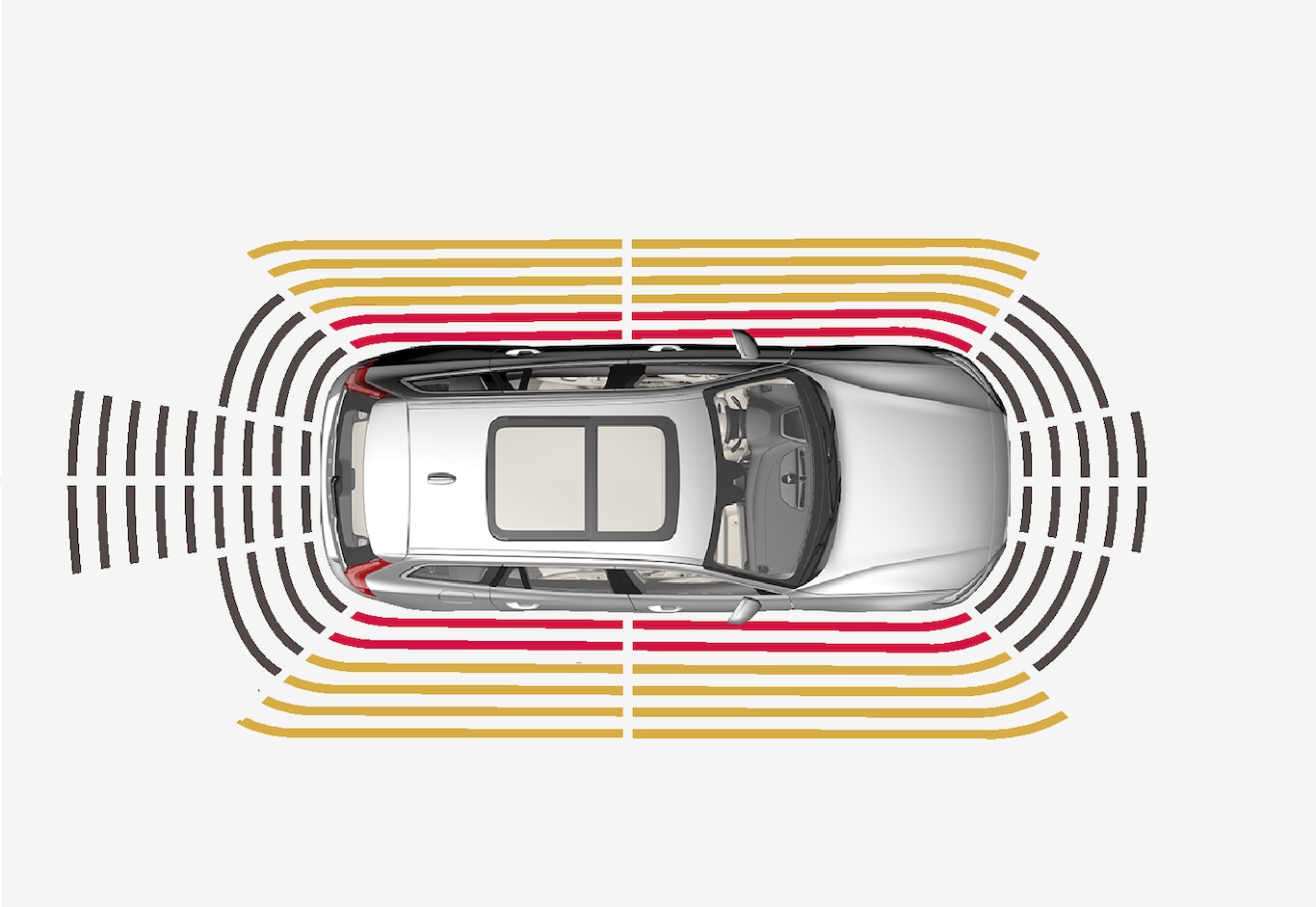
パークアシストサイドセンサーは、エンジン始動時に自動的に起動します。センサーは速度が10 km/h (6 mph)未満のときに作動します。
距離の測定は、両サイドから約25 cm (0.8 ft)の距離で開始します。
ただし、フロントホイールの操舵角が大きくなると、サイドセンサーの検知領域は大幅に拡大し、ステアリングホイールを回すと車両の斜め後方または前方約90 cm (3 ft)までの障害物を検知することができます。