이 기능은 공간을 측정하고 차량을 조향합니다. 운전자는 다음과 같이 하면 됩니다.
- 차량 주변 상황을 주시
- 중앙 화면에 표시되는 지침을 따름
- 기어(후진/전진) 선택 - "딸랑딸랑" 소리는 운전자가 기어를 변속해야 한다는 것을 나타냅니다.
- 안전한 속도의 조절과 유지
- 제동과 정지.
서로 다른 단계가 실시될 때 중앙 화면의 화면에 심벌, 그래픽 또는 문자가 나타납니다.
이 기능은 엔진 시동이 걸린 후 다음 조건이 충족되면 활성화할 수 있습니다.
- 차량에 트레일러가 연결되지 않은 경우
- 속도가 30 km/h(20 mph) 미만인 경우.
참고
PAP가 주차 공간을 찾으려면 차와 주차 공간 사이의 거리가 0.5–1.5 m(1.6–5.0 ft)가 되어야 합니다.
주차
PAP 기능은 다음과 같은 단계를 따라 차량을 주차합니다.
- 주차 공간을 식별하고 그 크기를 측정합니다.
- 차를 해당 공간으로 후진시킵니다.
- 차를 주차 공간에 위치시킵니다. 이를 위해 시스템이 운전자에게 기어 변속과 브레이크 체결을 요청할 수 있습니다.
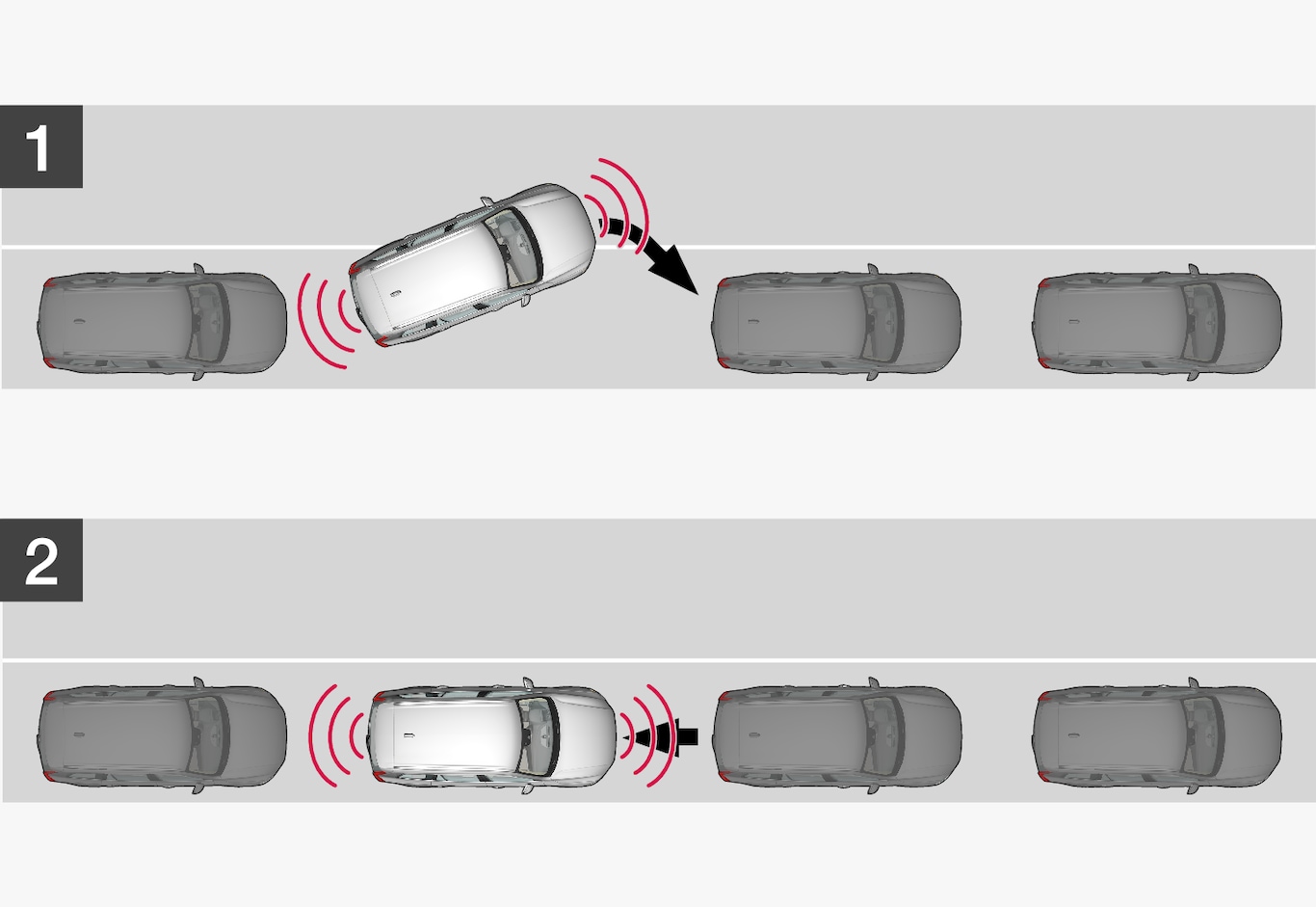
주차 공간 찾기 및 측정

이 기능은 중앙 화면의 기능 보기에서 켤 수 있습니다.
이는 카메라 보기에서도 접근할 수 있습니다.
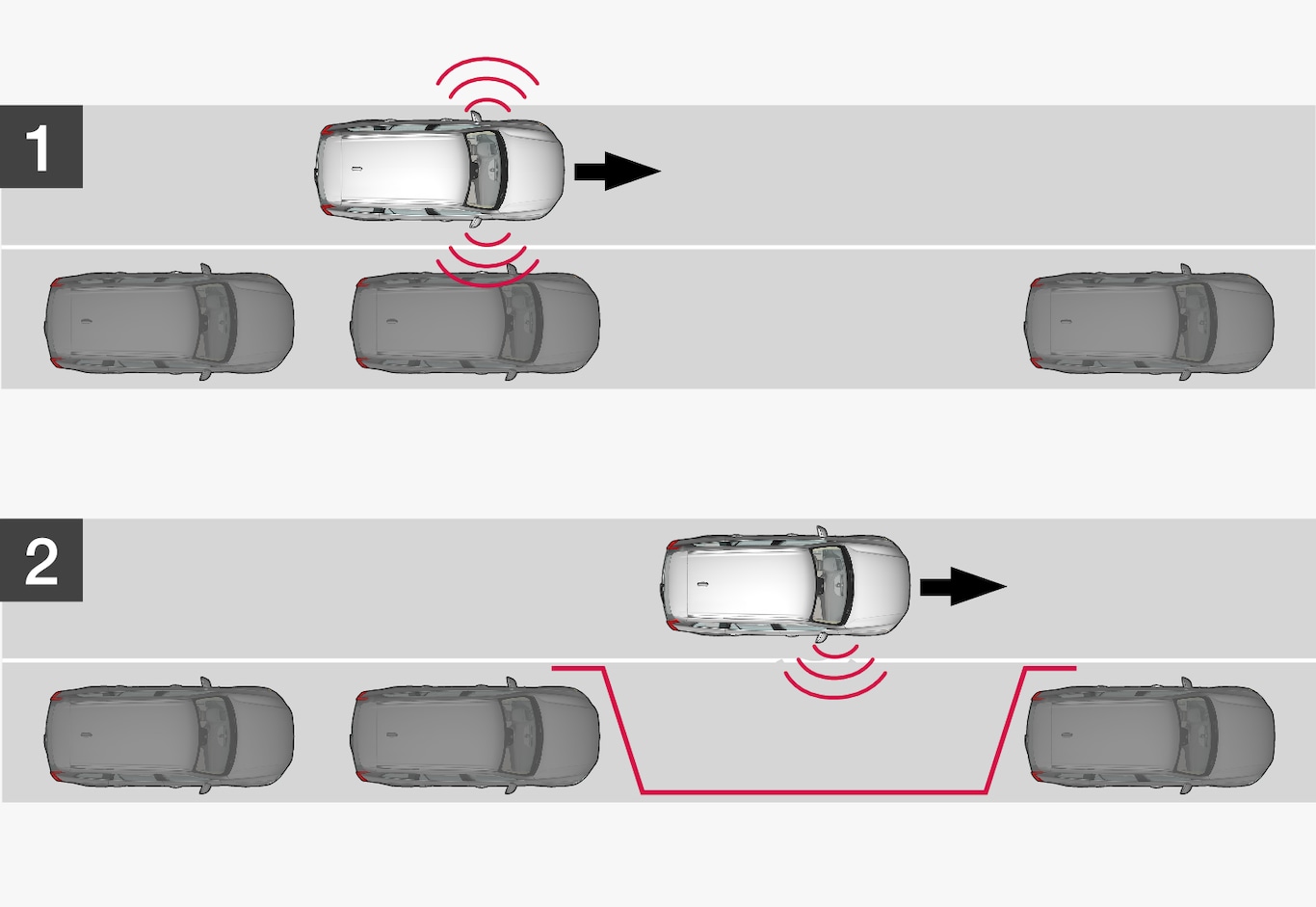
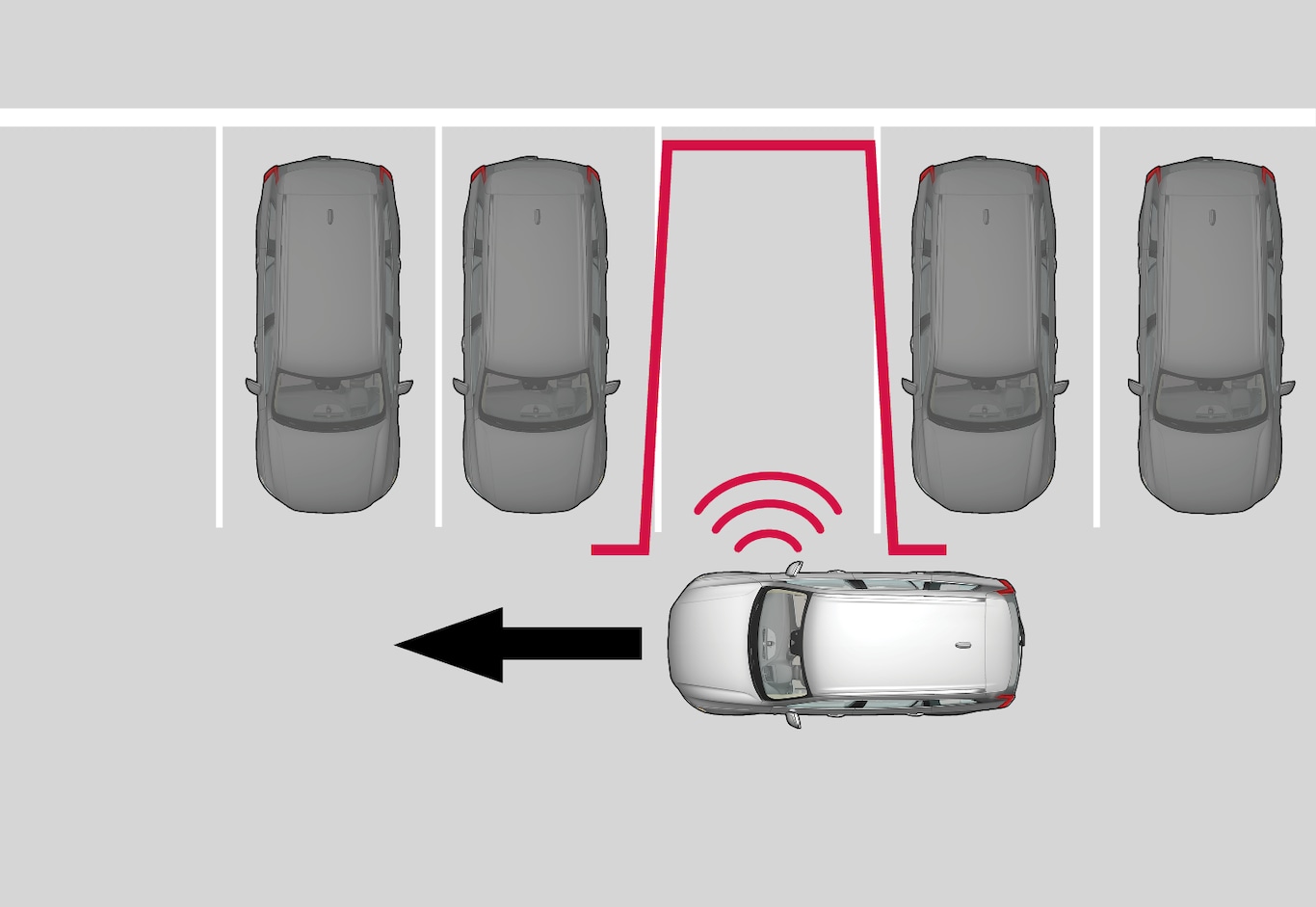
일렬 주차의 경우 30 km/h(20 mph)를 초과하여, 직각 주차의 경우 20 km/h(12 mph)를 초과하여 운전하지 않습니다.
기능 보기 또는 카메라 화면에서 파크 인 버튼을 터치합니다.
PAP는 주차 공간을 검색하고 충분히 큰지 점검합니다.
중앙 화면의 그래픽과 메시지가 적절한 공간을 발견했다고 밝히면 차량을 정지할 준비를 합니다.
팝업 창이 표시됩니다.
평행 주차 또는 직각 주차 선택 후 후진 기어를 선택합니다.
참고
이 기능은 조수석 쪽에서 주차 공간을 찾고 화면에 운전자가 할 일을 표시하며 차를 주차 공간으로 유도합니다. 필요에 따라 운전석쪽 주차 공간에 차를 주차시킬 수도 있습니다.
- 운전석쪽 방향지시등을 켜면 시스템이 운전석 쪽에서 주차 공간을 찾습니다.
주차 공간으로 후진하기
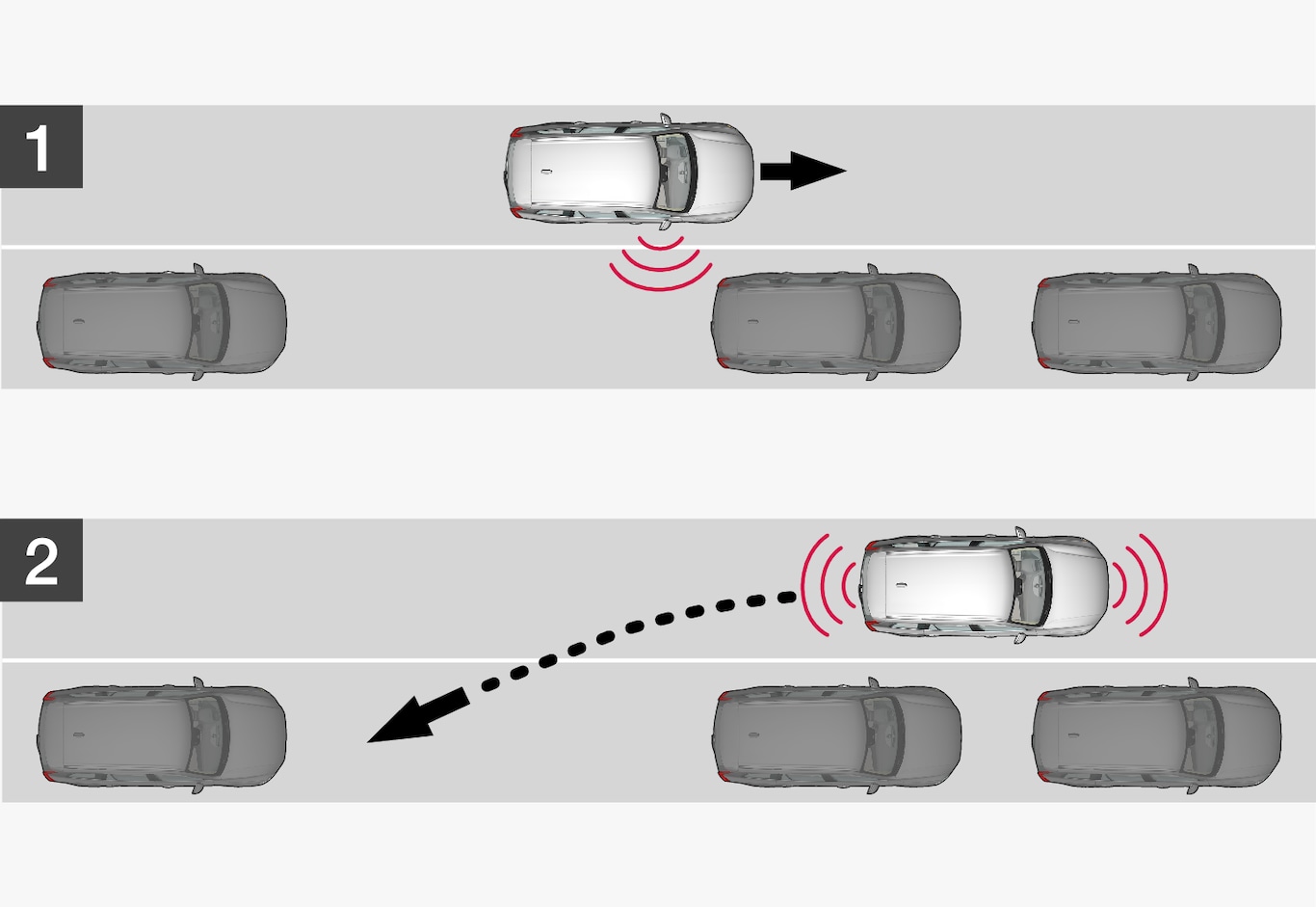
다음을 실시하여 차량을 주차 공간으로 후진합니다.
차량 뒤가 비어있는지 점검한 다음 후진 기어를 물립니다.
스티어링휠에 손을 대지 않은 상태에서 7 km/h(4 mph) 이하의 속도로 서서히 조심스럽게 후진합니다.
중앙 화면의 그림과 메시지가 가리키는 대로 차를 정지시킬 준비를 합니다.
참고
- 이 기능이 켜지면 스티어링 휠에서 손을 떼십시오.
- 스티어링휠이 어떤 식으로든 방해 받지 않게 하고 자유롭게 회전할 수 있도록 하십시오.
- 최적의 결과를 얻으려면 후진/전진을 시작하기 전에 스티어링휠이 완전히 회전할 때까지 기다리십시오.
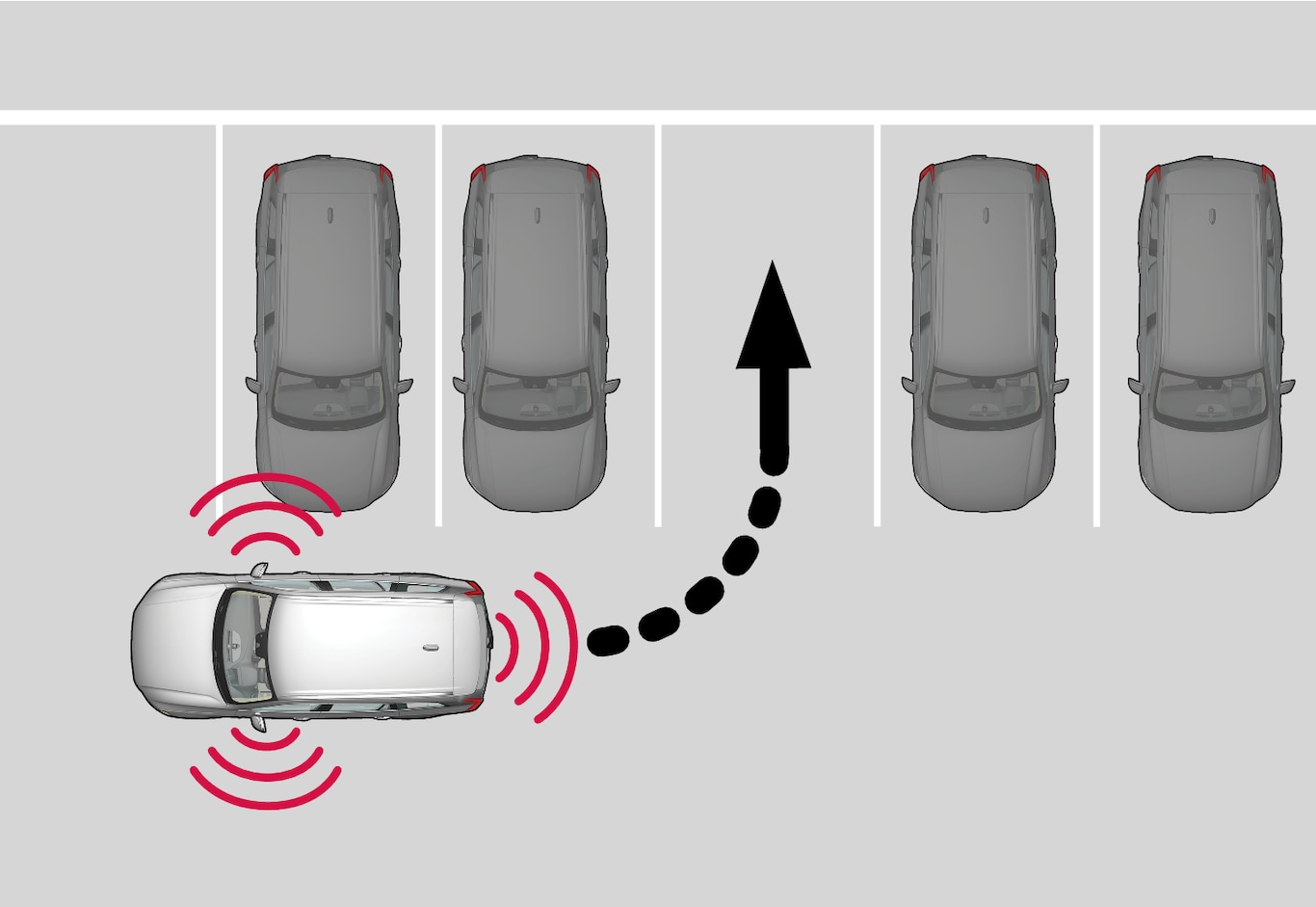
주차장에 차량 주차하기

다음과 같이 실시하십시오.
시스템의 지시를 따라 기어 셀렉터를 기어 위치로 옮기고 스티어링휠이 돌아가기를 기다렸다가 천천히 전진합니다.
중앙 화면의 그림과 메시지가 가리키는 대로 차를 정지시킬 준비를 합니다.
후진 기어를 선택한 후 뒤로 천천히 운전합니다.
중앙 화면의 그림과 메시지가 가리키는 대로 차를 제동할 준비를 합니다.
기능이 자동으로 꺼지게 되며 주차가 완료되었음을 그래픽 및 메시지로 표시됩니다. 운전자가 차량의 위치를 수정해야 할 필요가 있을 수 있습니다. 차량이 적절히 주차되었는지 여부는 운전자만 판단할 수 있습니다.
중요
주차 보조 시스템이 센서를 사용할 때와 비교하여 자동 주차 시스템(PAP2)이 센서를 사용할 때 경고 거리가 더 짧습니다.