후방
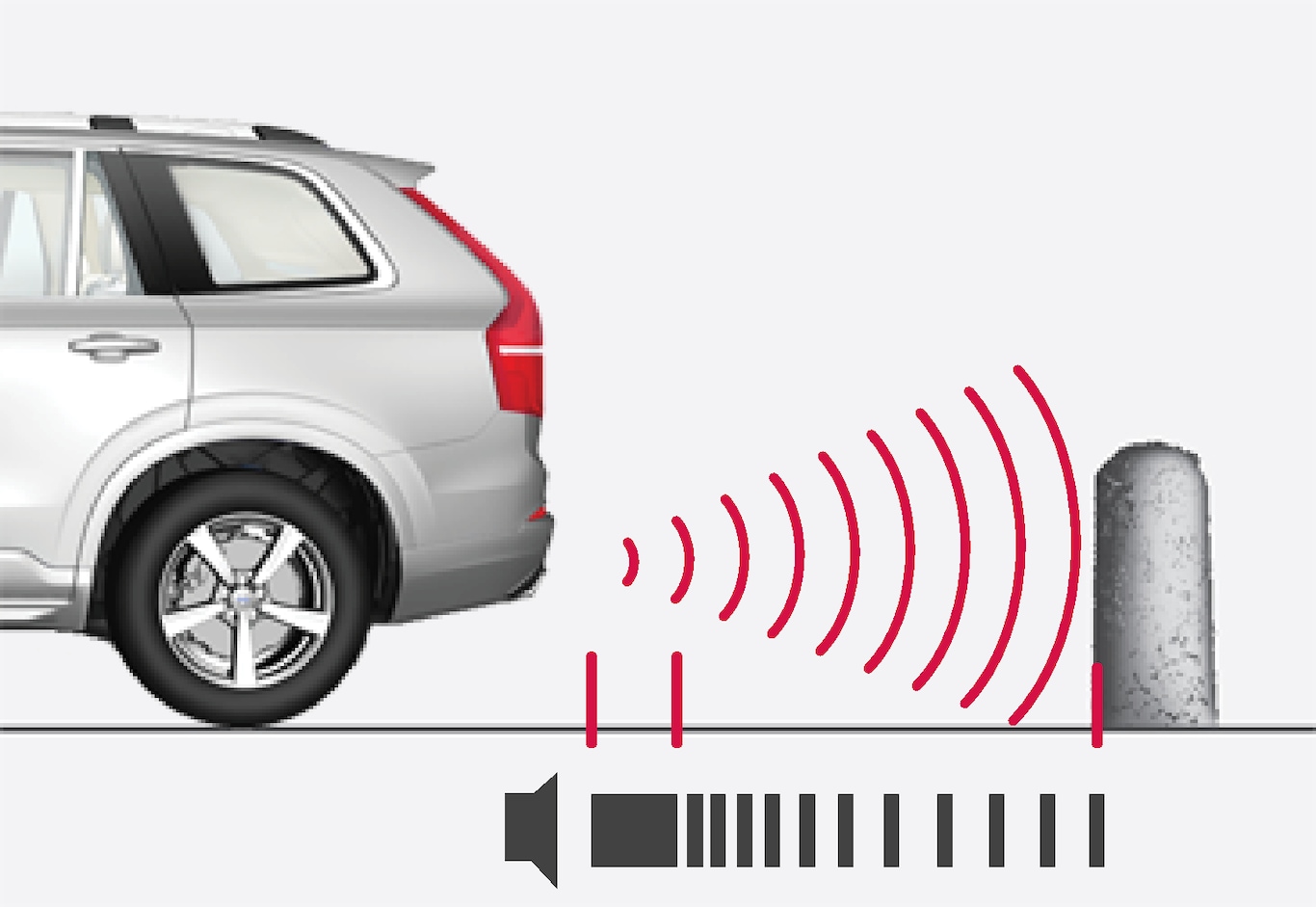
기어가 물리지 않은 상태에서 차량이 뒤쪽으로 구르거나 기어 레버가 후진 위치로 이동하는 경우에는 후진용 센서가 활성화됩니다.
측정 범위는 차량 후방 약 1.5 m( 5 ft)에서 시작됩니다.
트레일러가 연결된 상태에서 후진하면 후방 주차 지원 기능이 자동으로 비활성화됩니다.
참고
예를 들어 견인바에 트레일러 또는 자전거 캐리어를 연결하여 후진할 때 - 볼보 순정 트레일러 배선을 사용하지 않고 - 주차 보조 기능을 수동으로 꺼서 센서가 반응하지 않게 해야 할 수도 있습니다.
측면

엔진 시동이 걸리면 주차 지원 사이드 센서가 자동으로 활성화됩니다. 센서는 10 km/h 미만 (6 mph 미만)의 속도에서 활성 상태를 유지합니다.
측정 범위는 측면 약 30 cm (1 ft)에서 시작합니다. 측면에 있는 장애물에 대한 음향 신호는 사이드 스피커에서 납니다.
전방
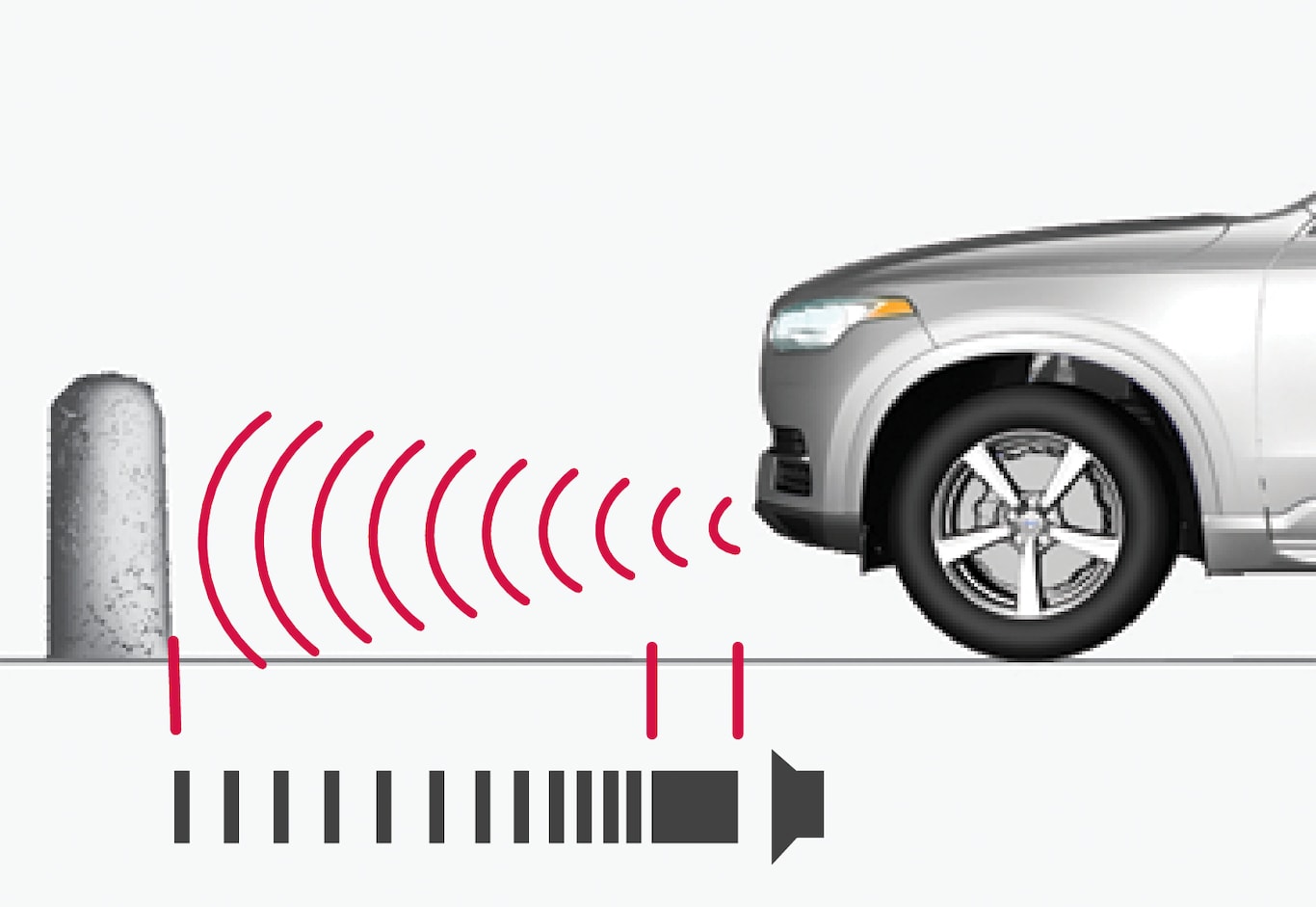
엔진 시동이 걸리면 전방 주차 지원 센서가 자동으로 활성화됩니다. 전방 센서는 10 km/h 미만 (6 mph 미만)의 속도에서 활성 상태를 유지합니다.
측정 범위는 차량의 전방 약 80 cm(2.5 ft)에서 시작됩니다.
참고
자동변속기 차량에서 주차 브레이크를 걸거나 P 모드를 선택하면 주차 보조장치가 꺼집니다.
중요
보조 램프 장착 시: 보조 램프가 센서를 가리지 않아야 합니다. 보조 램프가 장애물로 인식될 수 있습니다.