주행 모드를 사용하면 차량의 다양한 기능과 서로 다른 운전 필요 사항에 맞는 설정에 신속하게 접근할 수 있습니다. 각 주행 모드는 최적의 주행 특성을 제공하도록 조정됩니다.
- 조향
- 엔진/변속기/AWD
- 브레이크
- 에어 서스펜션* 및 충격 흡수
- 운전자 화면
- 온도 조절 설정
현재 주행 조건에 적용할 주행 모드를 선택합니다. 모든 주행 모드를 모든 상황에서 이용할 수 있는 것은 아니라는 점을 염두에 두십시오.
주행 모드의 종류
경고
경고
Hybrid
- 이는 차량의 기본 모드로서 전기 모터와 내연기관이 함께 작동합니다.
시동이 걸리면 차량은 Hybrid 모드에 있습니다. 컨트롤 시스템은 전기 모터와 내연기관을 모두 개별적으로 또는 병행해서 사용하며 성능, 연료 소비량 및 편안함 면에서 사용이 맞춰집니다. 고속에서는 지상고가 자동으로 낮은 레벨1로 조절되어 공기 저항을 감소시킵니다. 전기 모터만을 이용해 주행할 수 있는 거리는 하이브리드 배터리의 에너지 레벨과 실내의 난방 또는 냉방 수요 등에 따라 달라집니다.
높은 출력을 이용할 수 있는 경우에는 전력만으로 주행할 수 있습니다. 가속 페달을 밟으면 특정 위치에 도달할 때까지 전기 모터만 작동합니다. 이 위치를 넘어서고 배터리의 에너지 출력이 운전자가 가속 페달을 통해 요청하는 엔진 출력에 충분하지 않을 때 내연기관의 시동이 걸립니다.
에너지 레벨이 낮을 때(하이브리드 배터리가 거의 방전되었을 때)에는 배터리의 에너지 레벨을 유지해야 하며, 이로 인해 내연기관 시동이 더 자주 걸립니다. 하이브리드 배터리는 충전 케이블을 이용해 230 VAC 소켓에서 또는 기능 보기에서 Charge 활성화를 통해 충전하면 전기 구동만으로 주행할 수 있는 용량을 복원할 수 있습니다.
주행 모드는 전기 모터와 내연기관의 결합을 통해 온도 조절상의 쾌적성과 운전 경험을 손상시키지 않으면서 에너지 소비량을 낮출 수 있도록 설계되었습니다. 높은 가속이 필요한 경우에는 전기 구동 라인의 최대 추가 출력이 사용됩니다.
또한 차량은 AWD가 필요한 주행 조건인지 여부를 감지하고 필요한 경우 AWD를 자동으로 작동합니다. AWD와 추가적인 전기 출력은 배터리의 충전 상태와 상관없이 언제나 이용할 수 있습니다.
운전자 화면의 정보
하이브리드 모드로 주행할 때에는 운전자 화면에 하이브리드 게이지가 표시됩니다. 하이브리드 게이지의 바늘은 운전자가 가속 페달을 통해 얼마나 많은 에너지를 요청하는지를 나타냅니다. 번개 심벌과 기름 방울 심벌 사이의 표시는 이용할 수 있는 에너지가 얼마나 되는지를 표시합니다.
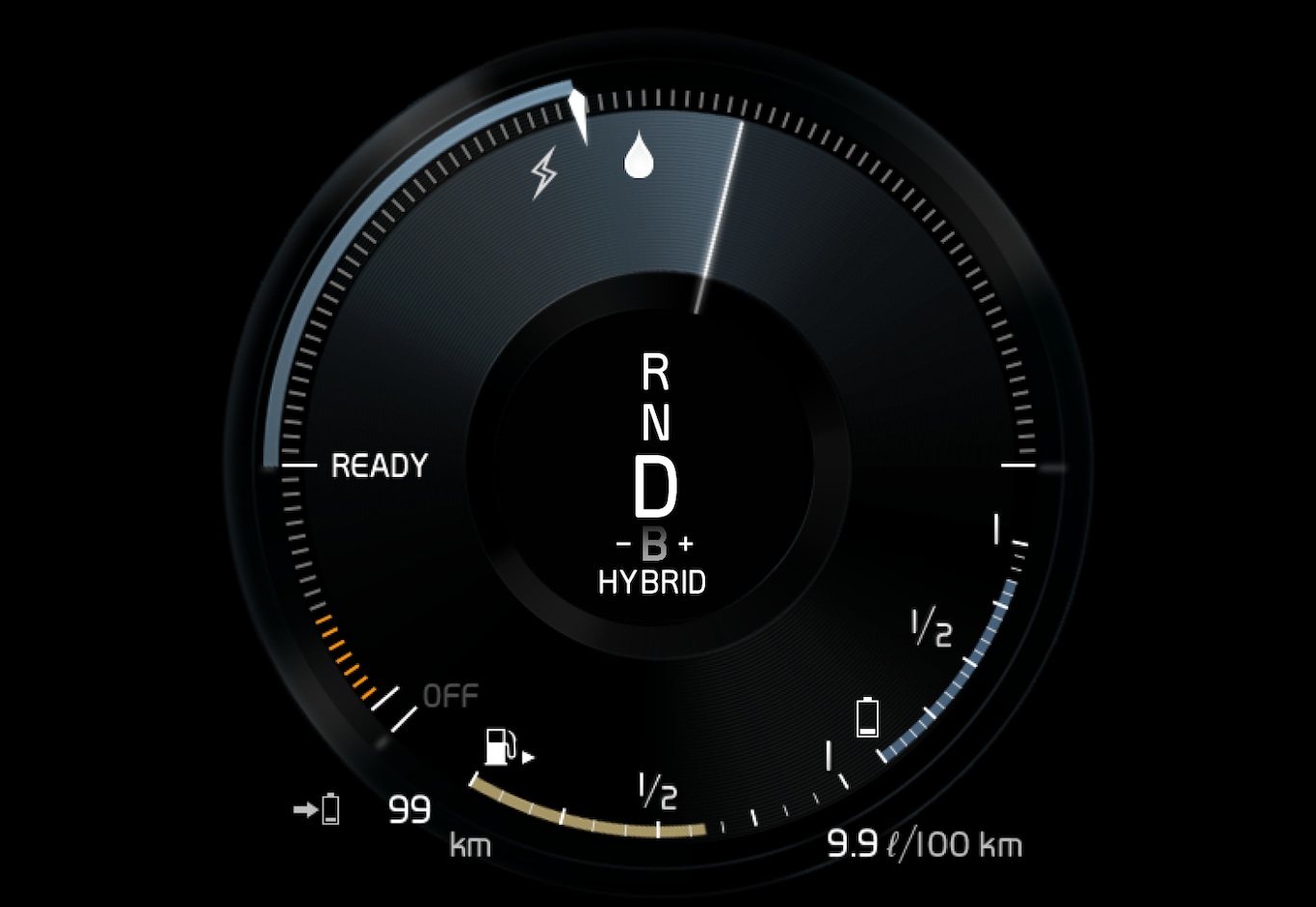
운전자 화면은 가벼운 제동 시 에너지가 배터리로 돌아가는 시점도 표시합니다.
Pure
- 전기 모터로 차량을 구동하면 에너지 소비량이 최대한 낮아지고 이산화탄소 배출량이 최저가 됩니다.
이 주행 모드는 하이브리드 배터리를 이용한 주행을 우선합니다. 이는 지상고가 낮아져1 공기 저항을 감소시키고 특정 온도 조절 설정 출력이 감소되어 전력만을 이용한 가장 긴 주행거리를 제공한다는 것을 의미합니다.
Pure 모드는 하이브리드 배터리의 에너지 레벨이 충분할 때 사용할 수 있습니다. 배터리의 에너지 레벨이 너무 낮아지면 Pure 모드에서도 내연기관이 시동됩니다. 다음과 같은 경우에 내연기관도 시동됩니다.
- 속도가 125 km/h (78 mph)를 초과하는 경우
- 전기 구동이 제공할 수 있는 것보다 큰 추진력을 운전자가 요청하는 경우
- 시스템/구성품 한계(예: 낮은 외부 온도)가 발생한 경우
이 주행 모드는 전기 구동을 이용한 주행거리를 극대화하기 위해 조정되었으며 특히 도심 주행용으로 개발되었습니다. Pure 주행 모드에서는 하이브리드 배터리가 방전된 경우에도 연소가 최소화됩니다. 실내의 온도 조절에는 ECO 모드가 적용되고, 미끄러운 주행 상황에서는 더 많은 휠 스핀이 발생한 후에 AWD가 자동으로 작동합니다.
ECO 온도 조절
Pure 주행 모드에서는 실내에서 ECO 온도 조절이 자동으로 작동하여 에너지 소비량을 감소시켜 줍니다.
참고
김이 서려 어려움이 있는 경우에는 최대 서리 제거 버튼을 누릅니다.
Off Road
- 험한 지형이나 비포장 도로를 주행할 때 차량의 접지력을 우선으로 합니다.
이 주행 모드에서는 지상고가 높아지고1, 조향이 가벼워지며 AWD와 내리막길 운전보조 시스템(Hill Descent Control)이 있는 저속 제어 기능이 활성화됩니다.
이 주행 모드는 최고 40 km/h (25 mph)까지의 저속에서만 이용할 수 있습니다. 속도가 초과되는 경우에 Off Road 모드가 취소되고 Constant AWD 주행 모드가 활성화됩니다.
네 휠을 모두 구동하려면 내연기관과 전기 모터가 지속적으로 작동하며 이로 인해 연료 소비량이 증가합니다.
Off Road 모드에서 운전자 화면에는 속도계와 타코미터 사이에 나침반이 있습니다. 속도계는 속도 제한 범위를 표시합니다.
이 주행모드는 도로 상태가 좋지 않거나 험한 지형에서 저속 운행 시 최대의 제어성을 제공할 수 있도록 적용되어 있습니다. 섀시가 높아지고1, 드라이브라인의 스로틀 반응성이 감소되며, 차량이 AWD 구동으로 잠깁니다. 내리막길 운전보조 시스템(Hill Descent Control)은 가파른 내리막길 주행 시 제어성을 높여줍니다.
참고
참고
중요
Constant AWD
- 개선된 AWD를 통해 차량의 접지력을 높일 수 있습니다.
이 주행모드에서는 차량이 AWD 구동으로 잠깁니다. 프런트 및 리어 액슬 간에 적용된 토크 분배는 미끄러운 도로 주행 시, 무거운 트레일러 장착 주행 시, 견인 시 등에 우수한 접지력과 안정성을 제공합니다. Constant AWD 주행 모드는 배터리의 충전 상태와 상관없이 항상 이용할 수 있습니다.
내연기관과 전기 모터가 모두 작동하여 네 휠을 모두 구동하며, 이로 인해 연료 소비량이 증가합니다.
차량의 다른 주행 모드에서는 차량이 도로 표면에 맞춰 자동으로 AWD 구동으로 전환하며, 필요한 경우에 전기 모터를 작동하거나 내연기관의 시동을 걸 수 있습니다.
Power
- 차량에 더 스포티한 특성이 적용되며 차량이 가속에 더 신속하게 반응합니다.
이 주행 모드는 내연기관과 전기 모터의 결합 출력에 맞춰 차량을 전방 및 후방 휠 모두로 구동합니다. 기어 변경이 더욱 신속해지고 보다 뚜렷하며 변속기는 접지력이 높은 기어에 우선순위를 부여합니다. 조향 반응은 더욱 신속하지만 충격 흡수는 보다 단단해집니다. 그리고 지상고1가 낮다는 것은 코너를 돌 때 롤링을 감소시키기 위해 차체가 도로를 따라간다는 것을 의미합니다.
내연기관과 전기 모터가 모두 작동하여 네 휠을 모두 구동하며, 이로 인해 연료 소비량이 증가합니다.
주행 모드는 최대 성능 및 가속시 반응에 맞춰집니다. 내연기관의 가속 페달 반응, 기어 변속 패턴, 부스트 압력 시스템이 변경됩니다. 섀시 설정, 조향 및 브레이크 응답도 최대한 양호합니다. Power 주행 모드는 배터리의 충전 상태와 상관없이 항상 이용할 수 있습니다.
또한 Power 모드를 Polestar Engineered 버전*에서 이용할 수 있습니다.
Individual
- 주행 모드를 사용자 개별 취향에 따라 맞출 수 있습니다.
시작할 주행 모드를 선택한 다음 원하는 운전 특성에 따라 설정을 조절합니다. 이러한 설정은 개별 운전자 프로필에 저장됩니다.
개별 주행 모드는 중앙 화면에서 먼저 작동시킨 경우에만 이용할 수 있습니다.
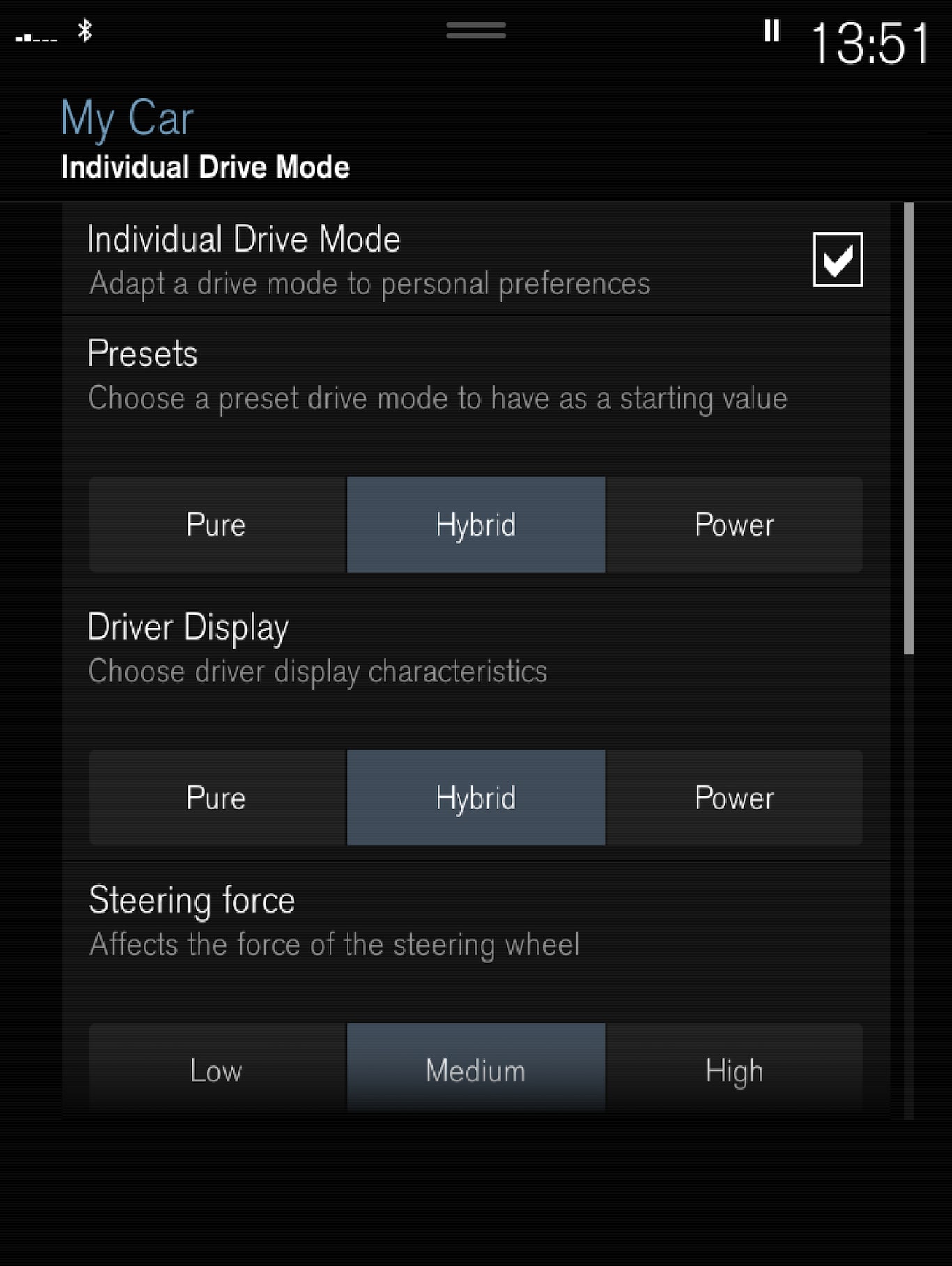
사전설정 항목에서, 시작할 주행 모드를 Pure, Hybrid, Power 또는 Polestar Engineered* 중에서 선택합니다.
조정 가능한 설정:
- 주행 정보창
- 조향력
- 파워트레인 특성
- 브레이크 특성
- 서스펜션 컨트롤
- ECO 온도 조절
전기 모터 또는 엔진 사용
첨단 컨트롤 시스템은 차량이 내연기관, 전기 모터 또는 둘 모두의 병행 구동이 실시되는 정도를 결정합니다.
주된 기능은 서로 다른 주행 모드의 특성과 가속 페달을 통한 운전자의 출력 요청에 대해 엔진 또는 모터 및 하이브리드 배터리의 이용 가능한 에너지를 가능한 한 효율적으로 사용하는 것입니다.
시스템의 일시적인 제한 또는 차량의 총 배출가스 레벨을 낮은 상태로 유지하기 위한 법적 요건의 적용을 받는 기능이 내연기관을 더 많이 사용할 수 있는 경우도 있습니다.