일렬 주차
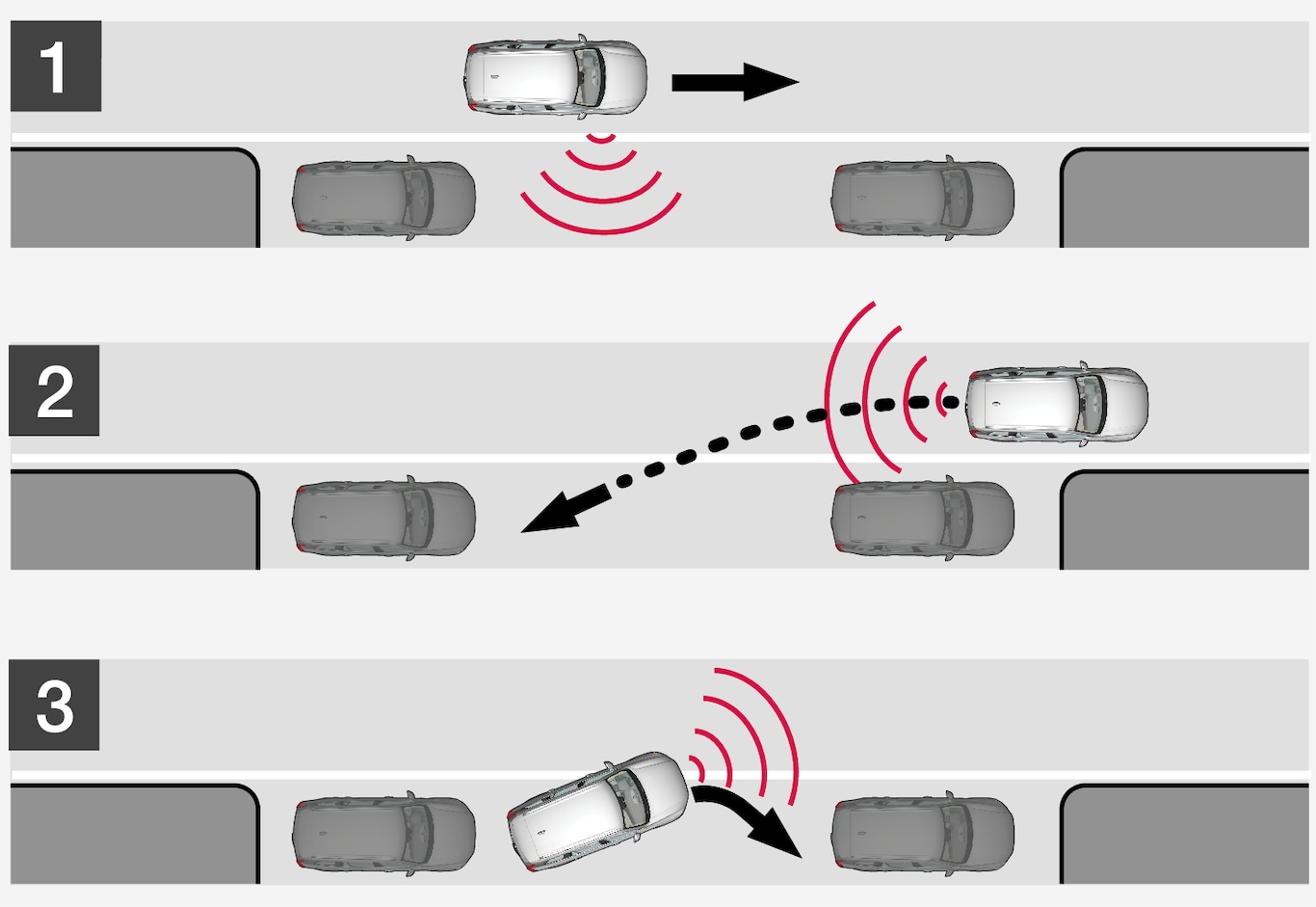
PAP 기능은 다음과 같은 단계를 따라 차량을 주차합니다.
- 주차 공간을 파악하여 측정합니다.
- 차량이 해당 공간으로 후진합니다.
- 전진/후진을 통해 차량이 공간 내에 위치합니다.
주차공간에서 나오기 기능을 사용하여 일렬 주차한 차량은 주차 공간을 떠나기 위해서도 PAP의 지원을 받을 수 있습니다. "파크 어시스트 파일럿" 섹션에서 "주차 공간 떠나기"를 참조하십시오.
직각 주차
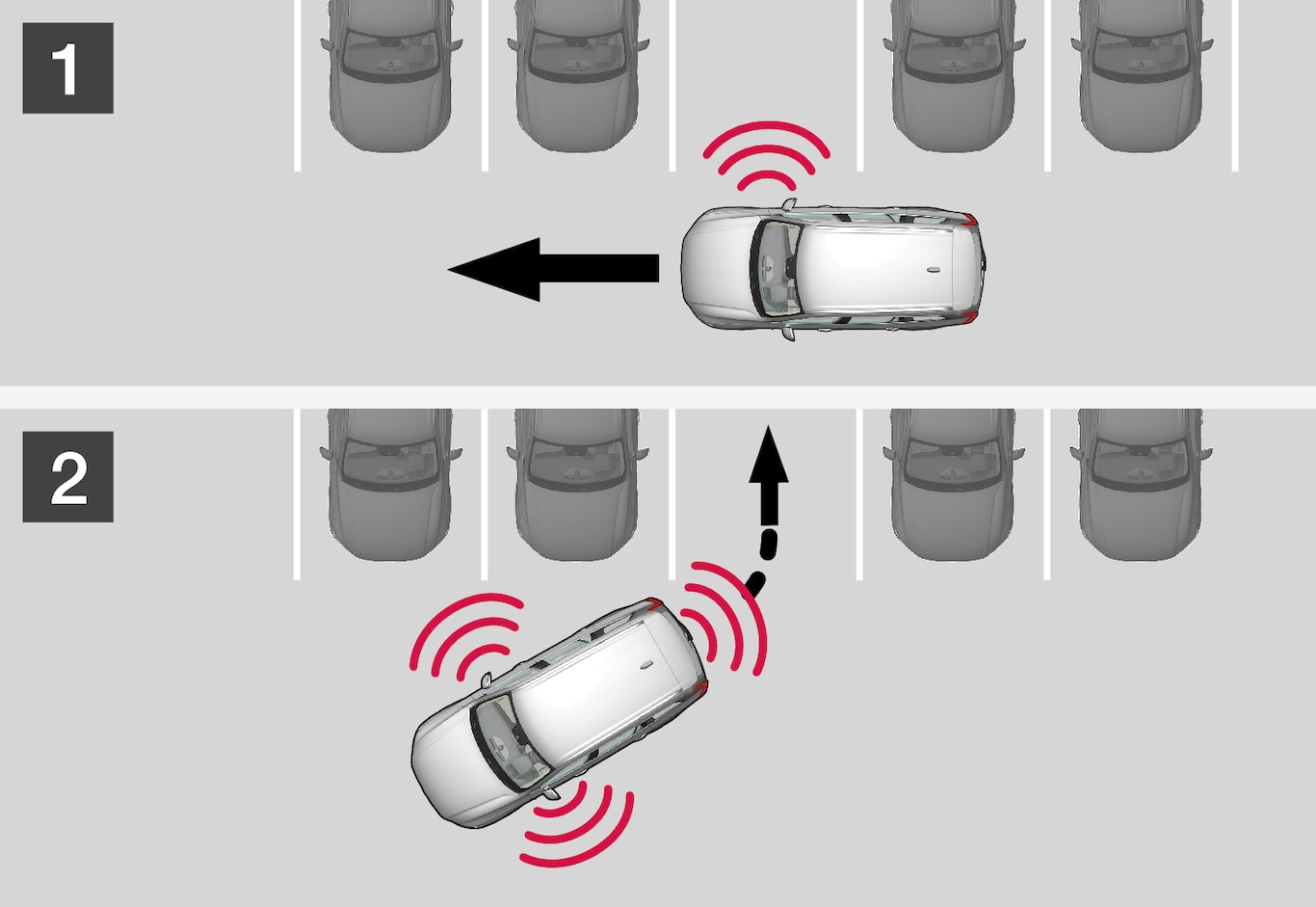
PAP 기능은 다음과 같은 단계를 따라 차량을 주차합니다.
- 주차 공간을 파악하여 측정합니다.
- 차량이 공간으로 후진하여 들어간 후 전진/후진을 통해 공간에 위치합니다.
참고
직각주차 상태에서는 PAP 주차공간에서 나오기 기능을 사용하여 주차 공간에서 나올 수 없습니다. 이 기능은 평행주차 상태에서만 사용해야 합니다.