Jūsu automašīnas spēja interpretēt informāciju par apkārtējo vidi tiek nodrošināta, izmantojot daudzas sistēmas un dažādus sensoru veidus. Automašīnas iegūto datu interpretācija nosaka tās darbību, īpaši attiecībā uz vadītāja palīgsistēmas funkcijām.
| Kameras | Kameras darbojas tāpat kā cilvēka acs. To uztvertā informācija tiek izmantota dažādos nolūkos atkarībā no kameras. Piemēram, augšējā uz priekšu vērstā kamera palīdz automašīnai identificēt tādus objektus kā ceļazīmes un ceļa apzīmējumus, savukārt informācija, ko tver aizmugurējā kamera novietošanai stāvēšanai, tiek parādīta displejā. |
| Radari | Radari izmanto radioviļņus, lai iegūtu informāciju par automašīnas apkārtni. Tie spēj noteikt attālumu līdz objektiem un noteiktus to kustības aspektus. Šī informācija ir būtiska attiecībā uz daudzām automašīnas funkcijām. |
| Ultraskaņas sensori novietošanai stāvēšanai | Šie sensori izmanto skaņas viļņus, lai noteiktu salīdzinoši tuvu esošus priekšmetus. Sensori darbojas, raidot ultraskaņas impulsus, kas var atgriezties sensoros pēc saskares ar objektu. |
Kā sistēmas mijiedarbojas
Dažādie noteikšanas veidi cits citu papildina. Reizēm tie tiek izmantot atsevišķi un reizēm — kopā.
Svarīgi
Vispārīgi noteikšanas un identifikācijas ierobežojumi
- Automašīna ne vienmēr var pareizi rīkoties neprognozējamās vai netipiskās situācijās. Ja automašīna nevar pareizi identificēt vidi vai situāciju satiksmē, tas negatīvi ietekmē automašīnas reakcijas precizitāti.
- Automašīnas bojājumi var ietekmēt noteikšanu un ar tai pakātotas funkcijas Automašīna var identificēt daudzus darbības traucējumus, tomēr dažus no tiem var nebūt iespējams patstāvīgi identificēt. Tādēļ ir svarīgi gādāt par to, lai automašīna būtu labā stāvoklī un darba kārtībā. Ja jums ir aizdomas par darbības traucējumiem vai pamanāt automašīnas bojājumus, sazinieties ar autorizētu Volvo servisu.
- Ierobežojoši faktori un apstākļi var sakrist, kas notiek bieži. Tie var notikt vienlaicīgi un mijiedarboties tā, ka tiek izraisīta nepareiza reakcija no automašīnas.
Šķēršļu noteikšanas ierobežojumi
Šķēršļu noteikšana palīdz automašīnai identificēt atsevišķus nekustīgus un kustīgus objektus. Šie objekti var būt citi ceļu satiksmes dalībnieki, tādi kā gājēji vai citi transportlīdzekļi, dzīvnieki, barjeras vai citi objekti. Atrodoties automašīnas braukšanas ceļa tuvumā, tie var izraisīt sadursmes risku. Atkarībā no apstākļiem automašīna var spēt brīdināt vai iejaukties, ja objekts ir noteikts precīzi. Attiecībā uz visiem objektu veidiem, ko automašīna spēj noteikt, pastāv daudzi faktori, kas var traucēt precīzu identifikāciju. Ierobežojošo faktoru, situāciju un notikumu piemēri ietver:
- Objektu un satiksmes dalībnieku blīvs, ar pārklāšanos vai daļēji bloķēts izvietojums.
- Objekti un satiksmes dalībnieki, kas saplūst ar fonu.
- Objekti un satiksmes dalībnieki, kas īpaši ātri pārvietojas vai paātrinās.
- Nestandarta transportlīdzekļi, tādi kā guļpozīcijas velosipēdi, kombaini vai piekabes ar nevienmērīgas formas kravu.
- Velosipēdi, kuru veids un izmērs atšķiras, salīdzinājumā ar parastu pieaugušo velosipēdu.
- Jauni transportēšanas veidi.
- Apģērbs vai pārvietojami priekšmeti, kas maina gājēja siluetu.
- Gājēji, kuru augums nepārsniedz 80 cm (32 collas).
- Šķēršļi ar tādām malām, kas veido nesaprotamu siluetu.
- Dzīvnieku lielums un ātrums. Kaķi un suņi bieži ir par mazu, lai tiktu ticami identificēti.
Piezīme
Satiksmes noteikšanas piemēri
Tālāk sniegtie dažādu satiksmes scenāriju piemēri var palīdzēt jums izprast atsevišķus automašīnas noteikšanas sistēmu ierobežojumus. Reālas dzīves situācijas bieži ir sarežģītākas, nekā ilustratīvi piemēri1, kas sniegti tālāk šajā rokasgrāmatā.
Ārpus redzamības lauka un vēlīna noteikšana
Vairākas noteikšanas zonas ap automašīnu ir statiskas, katra ar ierobežotu diapazonu un redzamības lauku. Ja kaut kas parādās noteikšanas zonā neparastā leņķī, lielā ātrumā vai ļoti tuvu jūsu automašīnai, tas var izraisīt ātru reakciju. Tas mazina drošuma rezervi salīdzinājumā ar situāciju, kurā bija iespējama agrīna noteikšana.
Svarīgi
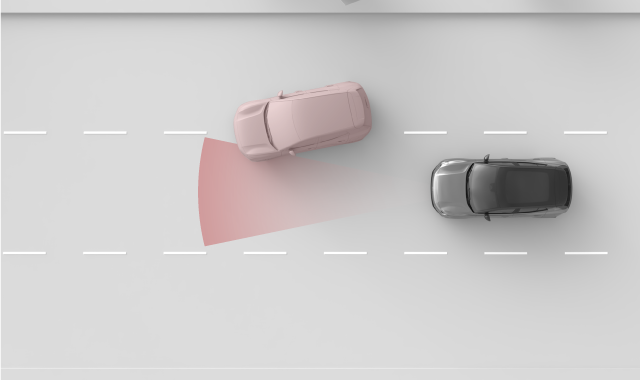
Novietojums joslā un mazi transportlīdzekļi
Priekšējām noteikšanas sistēmām ir vieglāk uztvert braukšanas joslas vidējo daļu pretstatā ārējām daļām. Transportlīdzekļus var nepamanīt, ja tie neaizņem vidējo joslas daļu. Lai arī tas var gadīties ar jebkuru transportlīdzekli, mazākiem, piemēram, motocikliem, risks ir lielāks. Tie neaizņem visu joslas platumu un var pārvietoties vairāk tās robežās. Vienmēr pievērsiet pastiprinātu uzmanību jebkuram transportlīdzeklim, kas nebrauc joslas vidū.
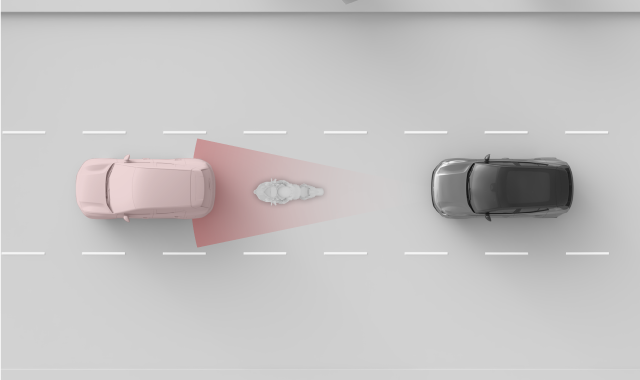
Objektu forma, lielums un skaits
- Mazus objektus ir grūtāk identificēt.
- Jo vairāk ir objektu, jo grūtāk ir identificēt kādu atsevišķi.
- Blīvi izvietotus, pārklājošus objektus ir grūtāk identificēt.
- Objektus ar nestandarta formām, piemēram, tādus, kuriem kaut kas pārkarājas vai ir izvirzītas daļas, ir grūtāk identificēt.
Ja priekšpusē ir apjomīgs transportlīdzeklis, var būt grūti identificēt mazāku transportlīdzekli, piemēram, motociklu.
Svarīgi
Piekabe priekšpusē
Salīdzinājumā ar citiem transportlīdzekļiem uz ceļa, piekabju noteikšana bieži ir mazāk ticama to formas un augstuma dēļ. Tas jo īpaši attiecas uz šaurām un zemām piekabēm, kā arī piekabēm ar ļoti liela augstuma kravas platformām. Šī veida piekabēm bieži nepietiek virsmas laukuma tajā augstumā, kurā fokusējas priekšējās noteikšanas sistēmas.
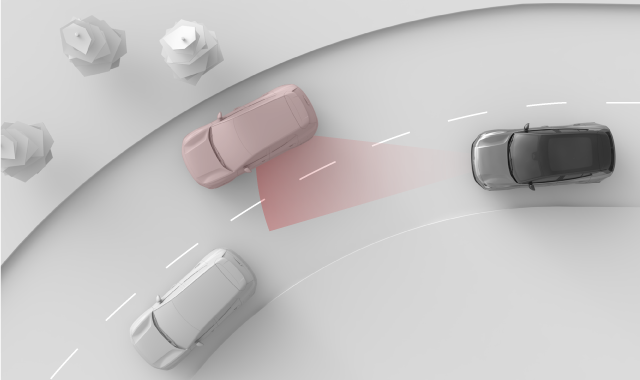
Ceļš un infrastruktūra
Ceļa līkumu dēļ automašīna var nepareizi interpretēt situāciju satiksmē. Piemēram, automašīna var pārstāt sekot līdzi kādam transportlīdzeklim vai nepareizi noteikt, kurā braukšanas joslā atrodas priekšā esošais transportlīdzeklis.
Svarīgi
Ceļa stāvoklis un nelīdzenumi
- Asi pagriezieni un nelīdzenumi uz ceļa var uz laiku aizsegt nozīmīgas automašīnas apkārtnes daļas, tādas kā citi transportlīdzekļi vai ceļa apzīimējumi.
- Automašīna var nepareizi uztvert nestandarta vai neierastu ceļa infrastruktūru. Piemēram, būvdarbu vai satiksmes izmaiņu posmos var būt pretrunīgi ceļa apzīmējumi vai vairāki ceļa apzīmējumu komplekti.
- Nodiluši ceļa apzīmējumi vai ceļa zīmes var būt nepareizi identificētas.