Je auto gebruikt talloze systemen en sensoren om de omgeving te detecteren. Hoe je auto de verzamelde gegevens interpreteert, bepaalt hoe je auto reageert, vooral bij de rijhulpsystemen.
| Camera's | Camera's werken ongeveer hetzelfde als het menselijke oog. Wat ze vastleggen, wordt voor verschillende doeleinden gebruiken, afhankelijk van de camera. Zo kan je auto met de bovenste, naar voren gerichte camera dingen als verkeersborden en wegmarkeringen identificeren, terwijl wat de parkeercamera aan de achterzijde vastlegt op het display wordt getoond. |
| Radars | Radars gebruiken radiogolven om informatie over de omgeving van de auto te verzamelen. Ze kunnen de afstand tot voorwerpen en bepaalde aspecten van hun bewegingen bepalen. Deze informatie is essentieel voor talloze functies in de auto. |
| Ultrasone parkeersensoren | Deze sensoren gebruiken geluidsgolven om voorwerpen waar te nemen die relatief dichtbij zijn. Ze versturen ultrasone pulsen die terug naar de sensoren kaatsen als ze een voorwerp tegenkomen. |
Hoe werken deze systemen samen?
De verschillende detectiemethoden vullen elkaar aan. Soms worden ze apart gebruikt, en soms samen.
Belangrijk
Algemene beperkingen bij detectie en identificatie
- De auto kan niet altijd onverwachte of abnormale situaties verwerken. Wanneer de auto de omgeving of een verkeerssituatie niet goed kan inschatten, heeft dit invloed op de nauwkeurigheid van de reactie van de auto.
- Schade aan de auto kan invloed hebben op de detectie en op functies die daarop vertrouwen. De auto kan veel storingen en fouten identificeren, maar niet allemaal. Daarom is het belangrijk dat de auto in goede staat blijft en goed werkt. Neem contact op met een erkende Volvo-werkplaats als je denkt dat er een storing is of als je schade aan de auto constateert.
- Beperkende factoren en omstandigheden doen zich vaak samen voor. Als ze samenvallen, kunnen ze ervoor zorgen dat de auto niet goed reageert.
Beperkingen bij detectie van obstakels
Detectie van obstakels helpt de auto om bepaalde stilstaande en bewegende voorwerpen te identificeren. Deze voorwerpen kunnen andere weggebruikers zijn, zoals voetgangers of andere voertuigen, of dieren, barrières of andere voorwerpen. Als ze zich in of vlak bij de rijbaan van de auto bevinden, kunnen ze een risico van een aanrijding vormen. Afhankelijk van de omstandigheden kan de auto waarschuwen of ingrijpen als het voorwerp nauwkeurig is geïdentificeerd. Voor alle soorten voorwerpen die de auto kan detecteren, zijn er talloze factoren die een nauwkeurige identificatie kunnen voorkomen. Voorbeelden van beperkende factoren, situaties en gebeurtenissen zijn:
- Voorwerpen en weggebruikers die vlak bij elkaar staan of rijden, die overlappen of die gedeeltelijk worden geblokkeerd.
- Voorwerpen en weggebruikers die wegvallen tegen de achtergrond.
- Voorwerpen en weggebruikers die zeer snel bewegen of accelereren.
- Ongebruikelijke voertuigen, zoals ligfietsen, dorsers of trailers met ongewone ladingen.
- Fietsen van een ander type of andere grootte dan normale fietsen voor volwassenen.
- Nieuwe vervoerstypen.
- Kleding of gedragen voorwerpen die het silhouet van een voetganger veranderen.
- Voetgangers kleiner dan 80 cm (32 inch).
- Gedraaide obstakels die een onbekend silhouet vormen.
- De grootte en snelheid van dieren. Katten en honden zijn vaak te klein om goed te worden geïdentificeerd.
N.b.
Voorbeelden van verkeersdetectie
De volgende voorbeelden van verschillende verkeerssituaties kunnen je helpen om de beperkingen van de detectiesystemen van je auto beter te begrijpen. Echte situaties zijn vaak ingewikkelder dan de volgende illustratieve1 voorbeelden in deze handleiding.
Buiten beeld en late detectie
De verschillende detectiegebieden van je auto zijn statisch en hebben elk een beperkt bereik en beeld. Als iets met een ongewone hoek, met hoge snelheid of zeer dicht bij je auto in een detectiegebied komt, kan dat een snelle reactie veroorzaken. Hierdoor nemen de veiligheidsmarges af ten opzichte van een situatie waarin detectie eerder mogelijk was.
Belangrijk
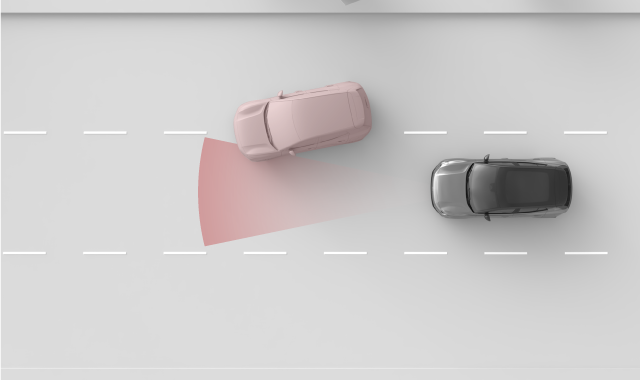
Positie in een rijstrook en kleine voertuigen
Bij detectie naar de voorzijde werken deze systemen beter met voertuigen in het midden van de rijstrook beter dan aan de zijkanten. Voertuigen kunnen mogelijk niet worden gezien als ze niet op het midden van een rijstrook rijden. Dat kan bij elk voertuig gebeuren, maar de kans is groter voor kleinere voertuigen, zoals motorfietsen. Ze nemen minder ruimte op de rijstrook in en kunnen meer bewegen binnen de rijstrook. Let altijd extra goed op voertuigen die niet midden op de rijstrook rijden.
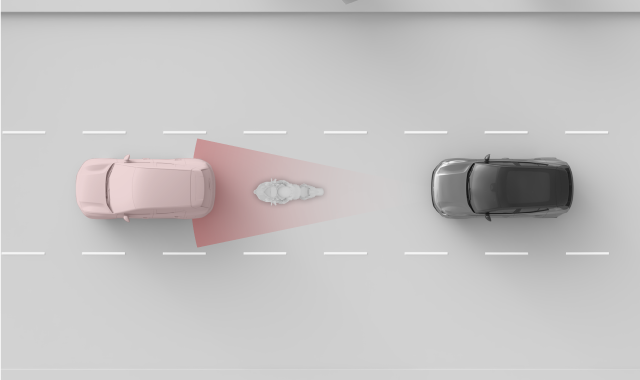
Vorm, grootte en aantallen van voertuigen
- Kleine voorwerpen zijn moeilijker te identificeren.
- Hoe meer voorwerpen er zijn, hoe lastiger het is om afzonderlijke voorwerpen te identificeren.
- Voorwerpen die zich vlak bij elkaar bevinden zijn lastiger te identificeren.
- Voorwerpen met ongelijke vormen, bijvoorbeeld met een overhang of uitstekende delen, zijn lastiger te identificeren.
De aanwezigheid van een groter voertuig voor je auto kan er soms voor zorgen dat een kleiner voertuig, zoals een motor, lastig is te identificeren.
Belangrijk
Aanhangwagen ervoor
Vergeleken met veel andere voertuigen op de weg kunnen trailers vaak minder betrouwbaar worden gedetecteerd door hun vorm en hoogte. Dat geldt vooral voor smalle trailers, lage trailers en trailers met een zeer hoog laadbed. Deze soorten trailers hebben vaak een te klein oppervlak op de hoogte waar de detectiesystemen werken.
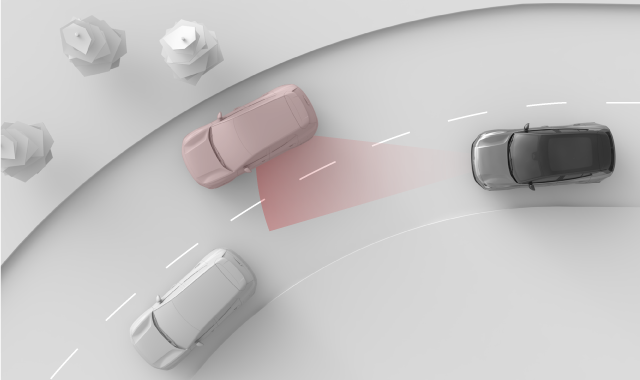
Weg en infrastructuur
Bochten in de weg kunnen ervoor zorgen dat de auto een verkeerssituatie verkeerd interpreteert. De auto kan bijvoorbeeld een voertuig 'kwijtraken' of niet goed zien in welke rijstrook een voorligger rijdt.
Belangrijk
De toestand van de weg en onregelmatigheden
- Scherpe bochten en hobbels in de weg kunnen het zicht op belangrijke delen van de omgeving van de auto tijdelijk belemmeren, zoals andere voertuigen of wegmarkeringen.
- Niet-standaard- of ongebruikelijke weginfrastructuur kan mogelijk niet goed door de auto worden geïdentificeerd. Wegwerkzaamheden en omleidingen van het verkeer kunnen er bijvoorbeeld voor zorgen dat er meerdere wegmarkeringen zijn.
- Versleten wegmarkeringen of verkeersborden kunnen mogelijk niet goed worden geïdentificeerd.