N.b.
PAP meet de ruimte en stuurt de auto – aan u de taak om:
- goed op de omgeving rond de auto te letten
- de instructies op het middendisplay op te volgen
- te schakelen (achteruit/vooruit) – er klikt een "belsignaal", wanneer u moet schakelen
- de snelheid te regelen en daarbij een veilige snelheid aan te houden
- te remmen en de auto tot stilstand te brengen.
Symbolen, grafische voorstellingen en/of teksten op het middendisplay geven aan, wanneer u iets moet doen.
PAP is te activeren als na het starten van de motor aan de volgende criteria is voldaan:
- Er is geen aanhangwagen aan de auto gekoppeld
- De snelheid moet lager zijn dan 30 km/h (20 mph).
N.b.
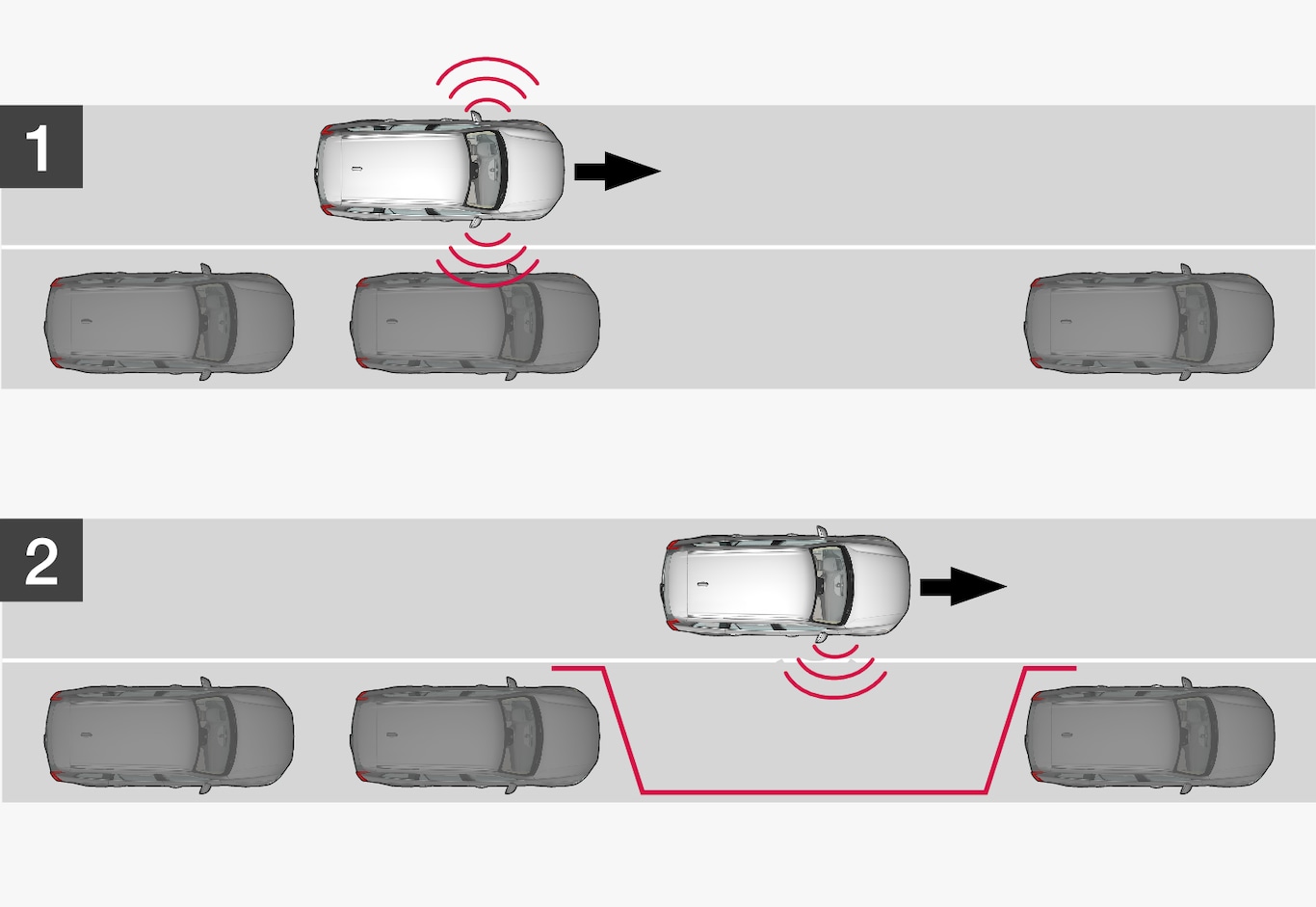
De afstand tussen de auto en parkeervakken moet 0,5–1,5 meter (1,6–5,0 ft) bedragen, wanneer PAP de omgeving aftast op zoek naar een passende parkeerplek.
Parkeren
PAP parkeert de auto aan de hand van de volgende deelmomenten:
- Het parkeervak wordt gezocht en gemeten.
- De auto wordt achteruit het vak ingestuurd.
- De auto wordt netjes in het midden van het vak geparkeerd - het systeem kan u vragen om te schakelen.
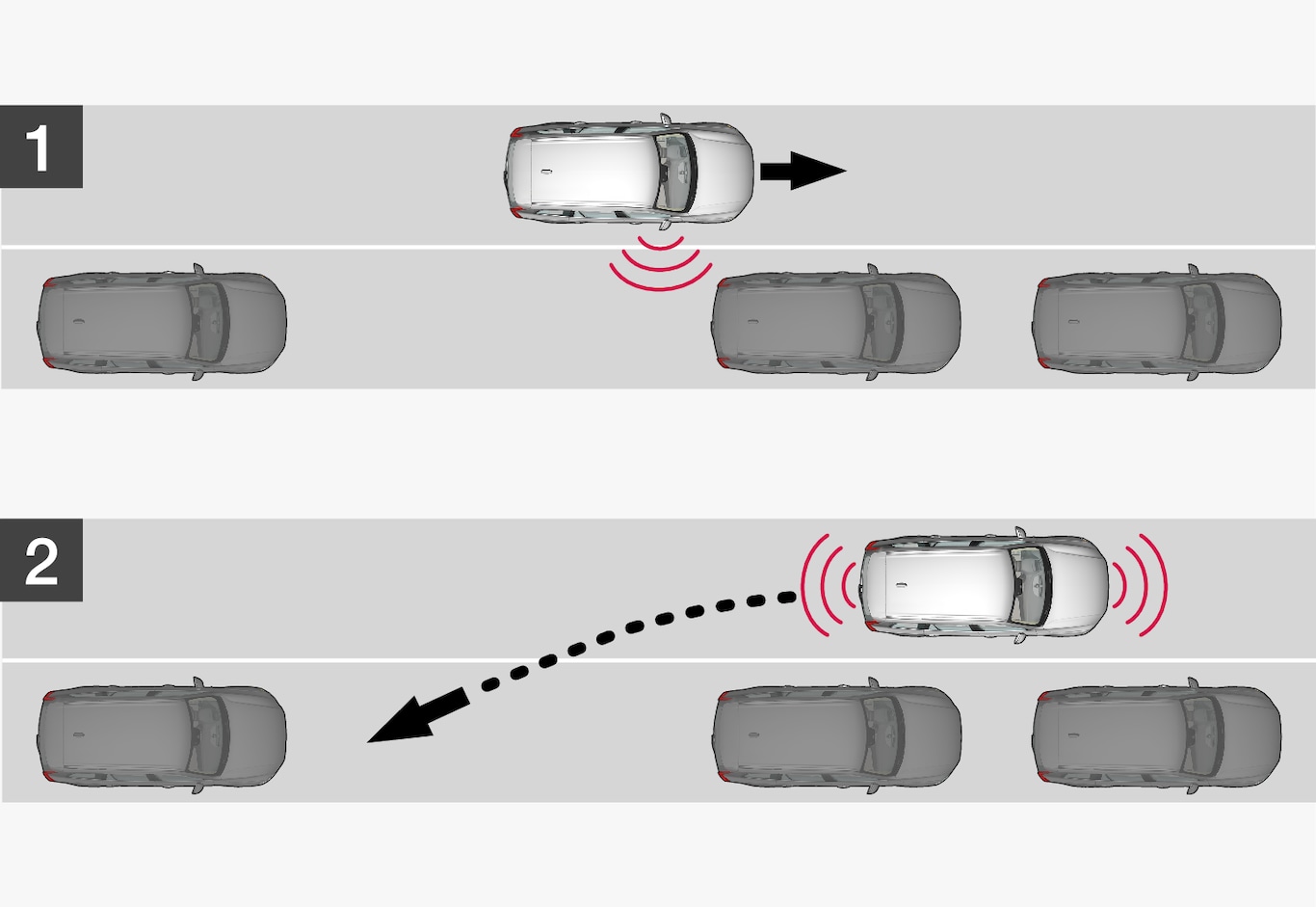
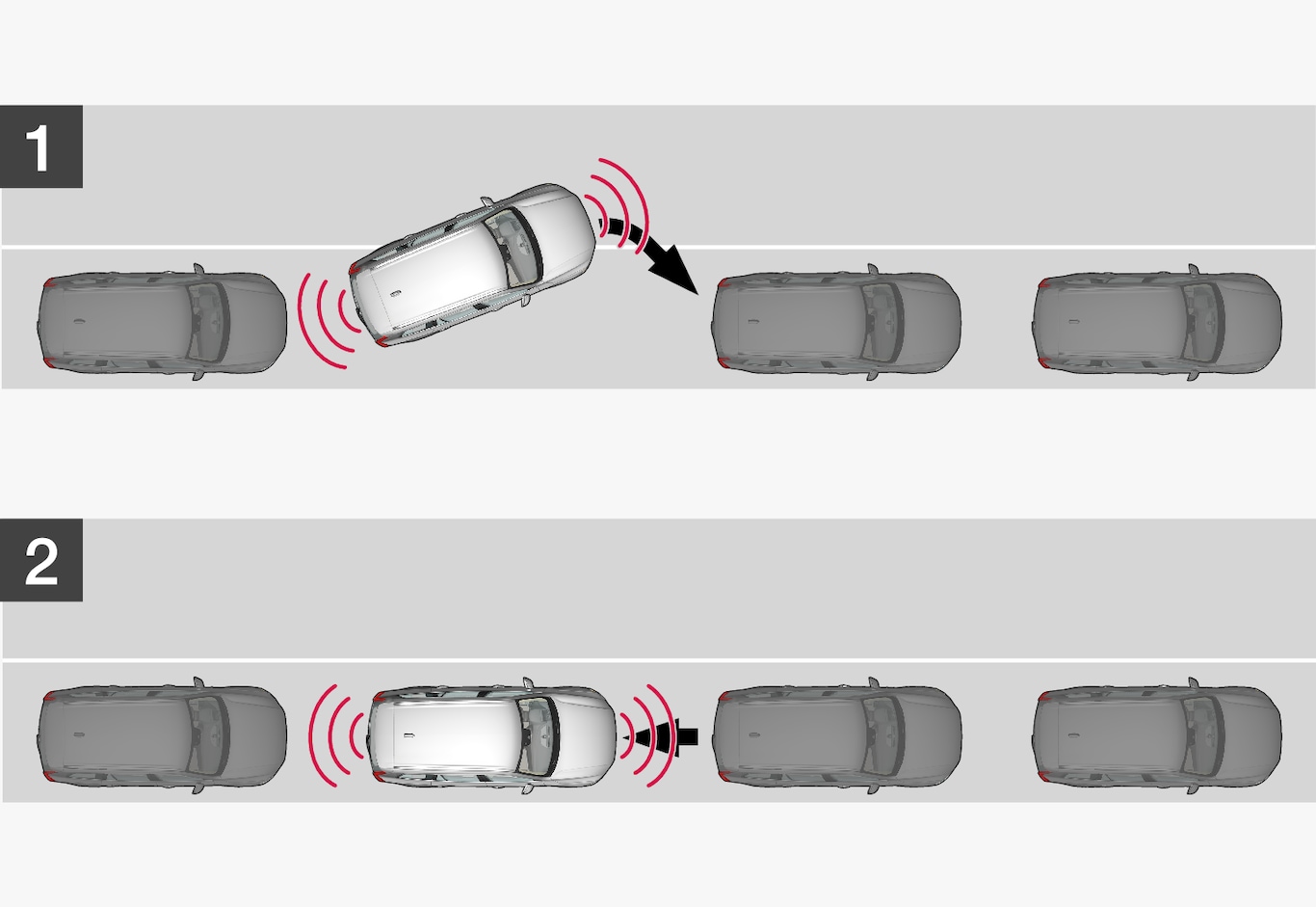
Parkeervakken zoeken en meten

De functie is te activeren op het functiescherm van het middendisplay.
Deze is ook bereikbaar vanuit de camerabeelden.
U doet dat als volgt:
Rijd maximaal 30 km/h (20 mph) voordat u gaat fileparkeren of achteruit gaat insteken.
Tik op de knop Inparkeren in het functiescherm of in het camerascherm.
PAP zoekt een parkeervak en meet of dit vak groot genoeg is.
Zorg dat u klaar bent om te stoppen als het beeld en de melding op het middendisplay u vertellen dat er een geschikte parkeerplaats gevonden is.
Er verschijnt een pop-upvenster.
Kies Fileparkeren of Haaks parkeren en schakel in de achteruit.
N.b.
PAP zoekt een geschikte ruimte om te parkeren, geeft instructies en parkeert de auto aan de passagierskant in. Desgewenst kunt u de auto ook aan de bestuurderszijde van de straat parkeren:
- Schakel de richtingaanwijzers aan de bestuurderszijde in, waarna het systeem een geschikte parkeerplek aan deze kant van de straat zoekt.
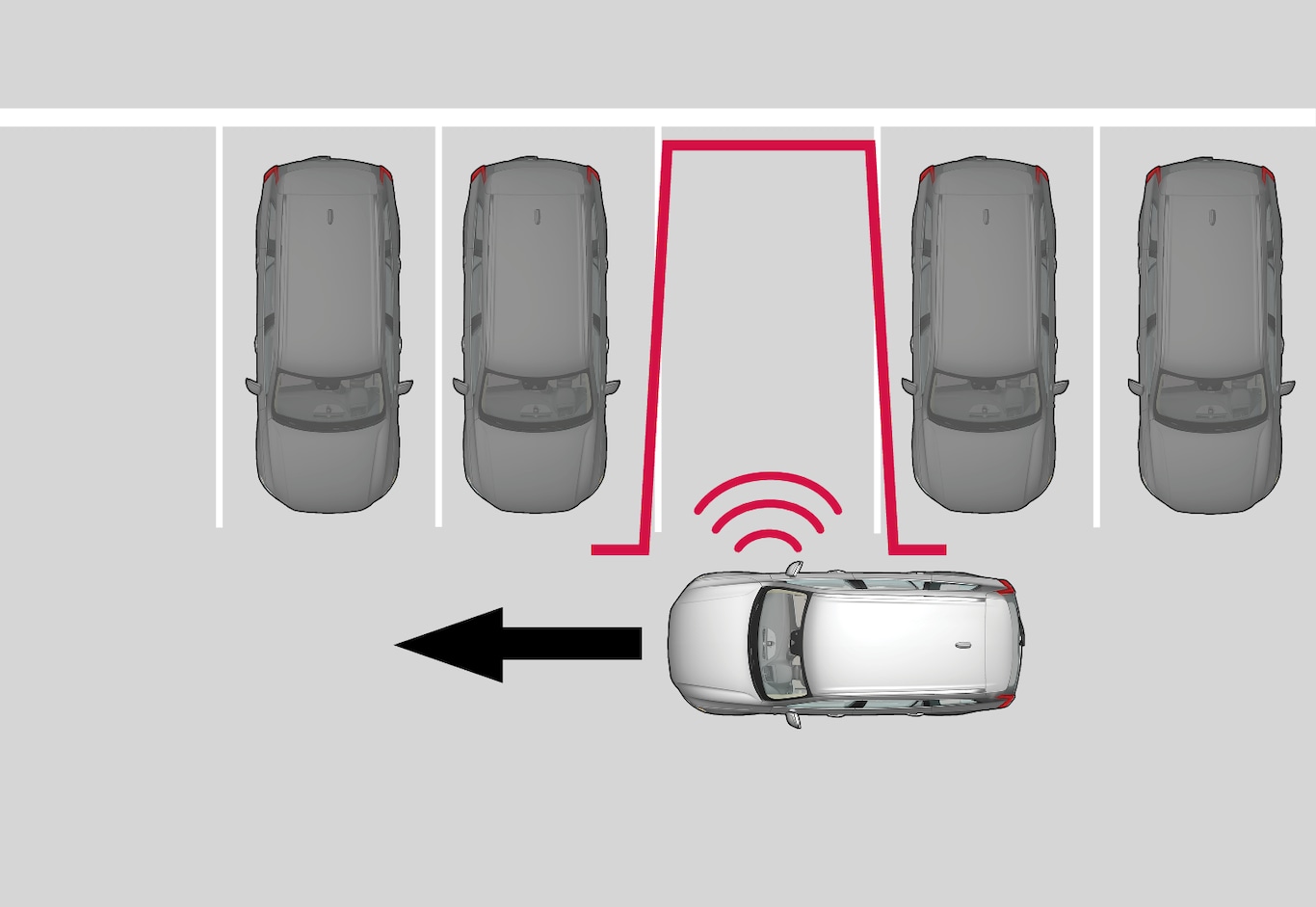
Achteruit inparkeren
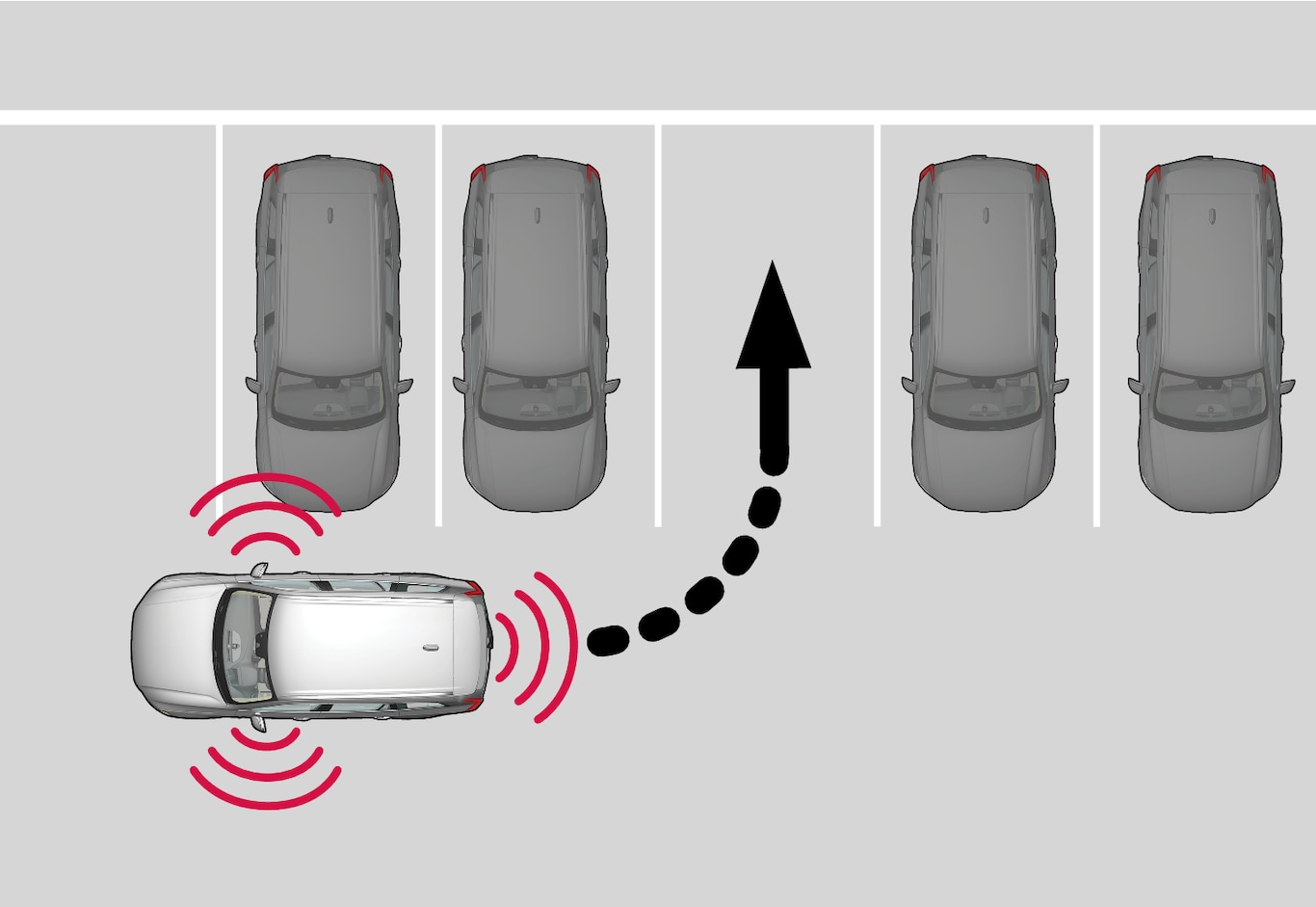
Doe het volgende om de auto achteruit in te parkeren:
Controleer of de ruimte achter u vrij is en schakel de achteruitversnelling in.
Rijd langzaam en voorzichtig achteruit en raak het stuurwiel niet aan – rijd niet sneller dan zo'n 7 km/h (4 mph).
Zorg dat u klaar bent om te stoppen als het beeld en de melding op het middendisplay u hiertoe verzoeken.
N.b.
- Houd uw handen weg van het stuurwiel als de PAP-functie is geactiveerd.
- Let erop dat het stuurwiel niet door iets wordt gehinderd en vrij kan draaien.
- Wacht voor het beste resultaat totdat het stuurwiel is uitgedraaid, voordat u achteruit/vooruit rijdt.
Auto netjes in het midden van het parkeervak parkeren

U doet dat als volgt:
Zet de keuzehendel in stand D. Wacht totdat het stuur gedraaid is en rijd langzaam vooruit.
Zorg dat u klaar bent om te stoppen als het beeld en de melding op het middendisplay u hiertoe verzoeken.
Schakel in de achteruit en rijd langzaam achteruit.
Zorg dat u klaar bent om te stoppen als het beeld en de melding op het middendisplay u hiertoe verzoeken.
Het systeem wordt automatisch gedeactiveerd, waarna met grafische voorstellingen en een melding wordt aangegeven dat het insteken is afgerond. U moet mogelijk later corrigeren - alleen u kunt beoordelen of de auto goed geparkeerd staat.
Belangrijk
De waarschuwingsafstand is korter, wanneer de sensoren worden gebruikt door PAP dan wanneer Park Assist de sensoren gebruikt.