Achterzijde
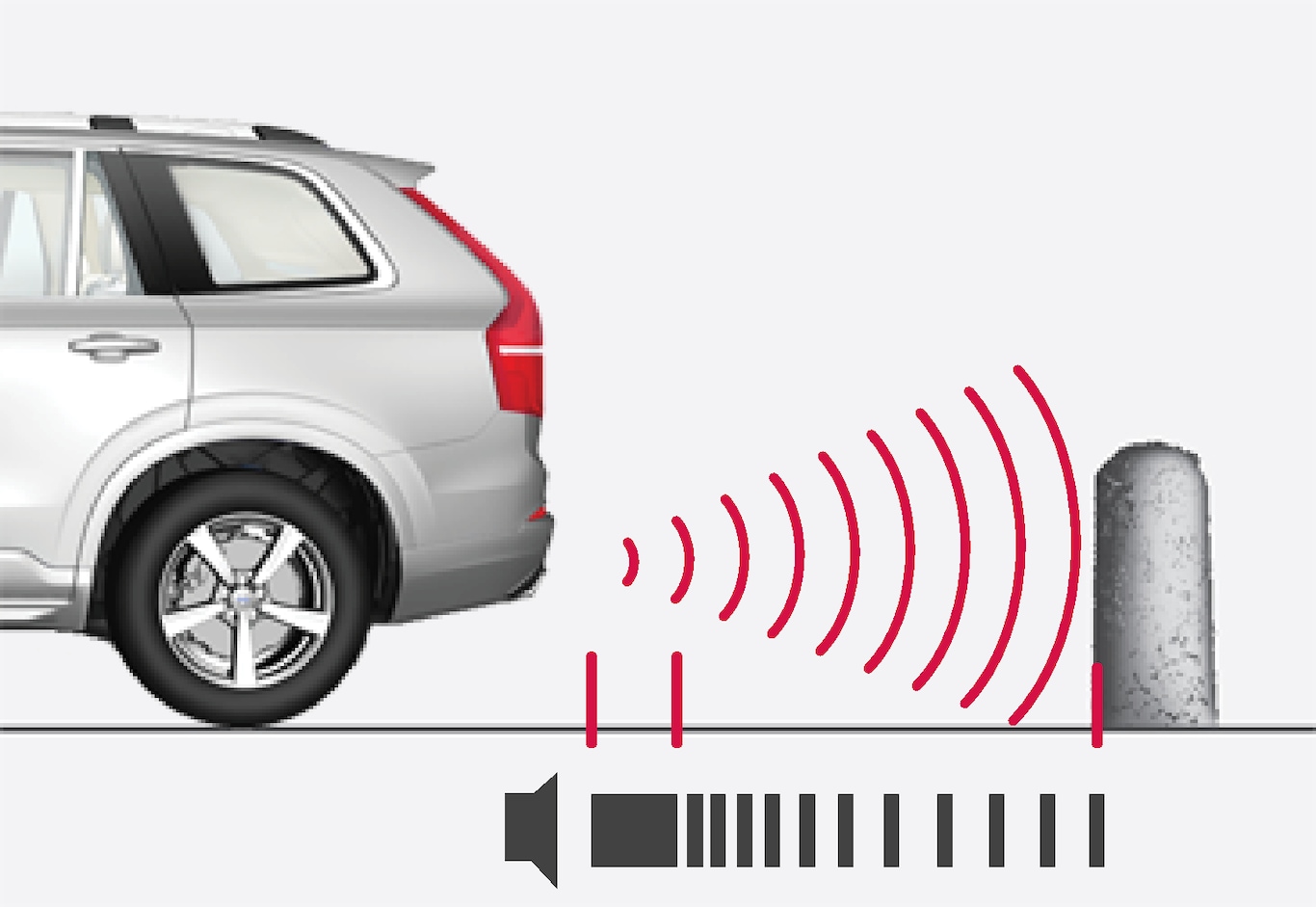
Als de auto in zijn vrij achteruitrolt of wanneer u de keuzehendel in de stand voor achteruitrijden zet, worden de sensoren aan de achterzijde geactiveerd.
Het meetgebied reikt tot zo'n 1,5 meter (5 ft) achter de auto.
Bij het achteruitrijden met een aanhangwagen achter de auto wordt de parkeerhulp automatisch gedeactiveerd.
N.b.
Aan de zijkanten

De zijsensoren van de parkeerhulp worden bij het starten van de motor automatisch geactiveerd. Ze zijn actief bij snelheden lager dan 10 km/h (6 mph).
Het meetgebied reikt tot zo'n 30 cm (1 ft) naast de zijkanten. Bij detectie van obstakels aan de zijkant komen de geluidssignalen uit de luidsprekers aan de zijkant.
Naar voren
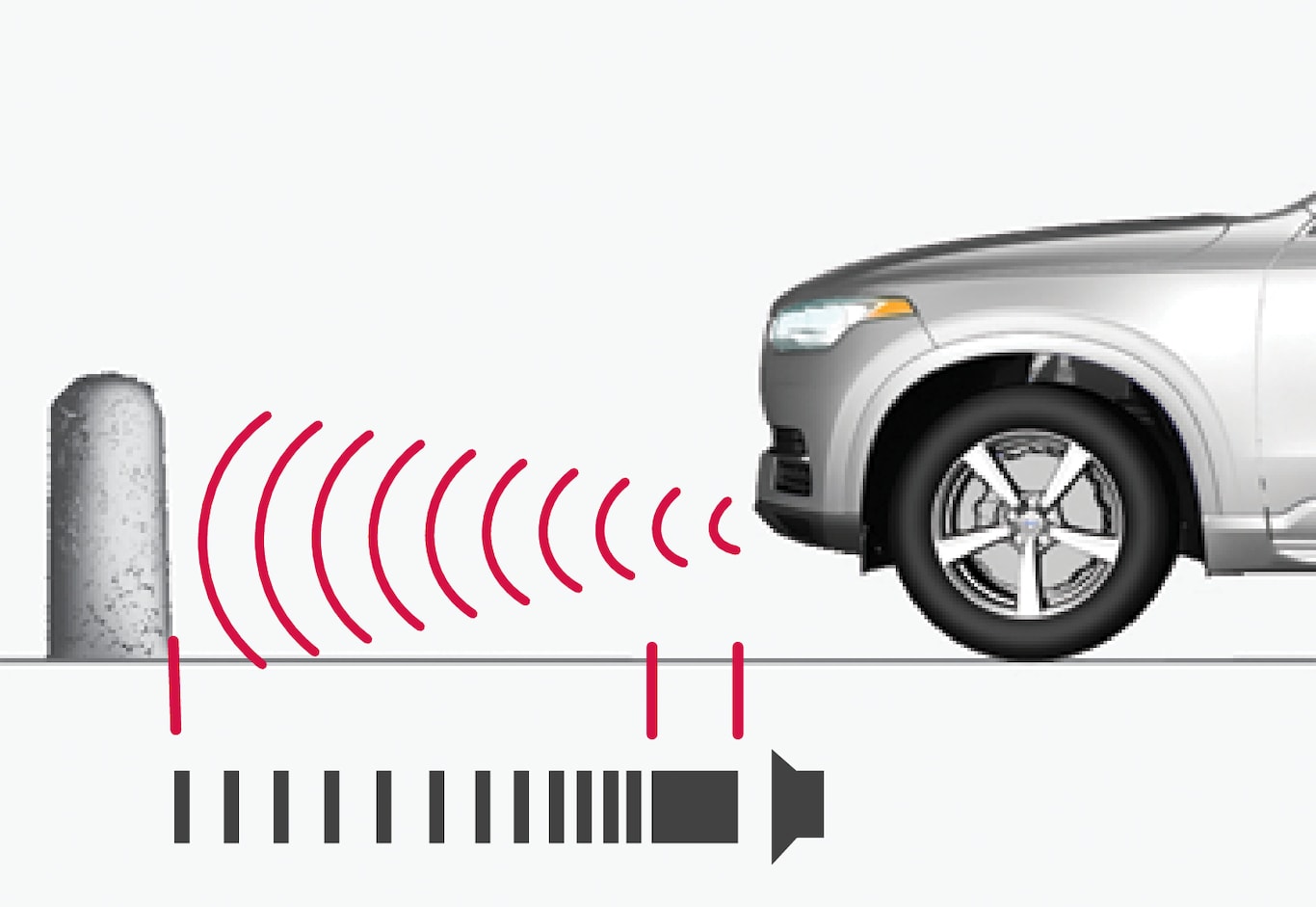
De voorsensoren van de parkeerhulp worden bij het starten van de motor automatisch geactiveerd. De voorsensoren zijn actief bij snelheden lager dan 10 km/h (6 mph).
Het meetgebied reikt tot zo’n 80 cm (2,5 ft) voor de auto.