Capacitatea mașinii de a interpreta zona din jur utilizează mai multe tipuri de senzori și de sisteme. Interpretarea datelor pe care mașina le colectează permite înțelegerea comportamentului mașinii, fapt util mai ales pentru funcțiile de asistență pentru șofer.
| Camerele | Camerele funcționează asemenea ochiului uman. Ceea ce captează se utilizează în scopuri diferite, în funcție de cameră. De ex., camera superioară cu fața la sensul de mers ajută mașina să identifice elemente precum indicatoarele rutiere și marcajele rutiere, în timp ce capturile camerei de parcare din spate apar în afișaj. |
| Radare | Radarele utilizează undele sonore pentru a colecta informații despre împrejurimile mașinii. Acestea pot identifica distanța față de obiecte și anumite aspecte ale deplasării acestora. Aceste informații sunt esențiale pentru mai multe funcții din mașină. |
| Senzorii de parcare ultrasonici | Acești senzori utilizează undele sonore pentru a detecta obiectele aflate relativ în apropiere. Aceștia funcționează prin trimiterea de impulsuri ultrasonice, care se reflectă înapoi către senzor atunci când întâlnesc un obiect. |
Cum conlucrează sistemele
Tipurile diferite de detecție se completează între ele. Uneori, sunt utilizate în mod individual, alteori, împreună.
Important
Limitări generale de detecție și identificare
- Mașina nu poate întotdeauna să gestioneze situații neprevăzute sau ciudate. În momentul în care mașina nu reușește să identifice corect mediul sau situația din trafic, precizia răspunsului va suferi.
- Avarierea mașinii poate afecta detecția și funcțiile care se bazează pe aceasta. Mașina poate identifica multe erori, dar unele nu pot fi identificate automat. Din acest motiv, este important să vă asigurați că mașina este în stare bună și funcționează corect. Contactați un atelier autorizat Volvo în cazul în care suspectați că există erori sau în cazul în care observați o avarie la mașină.
- Factorii și condițiile limitatoare pot coincide. Acestea pot include și interacționa în moduri în care se poate produce un răspuns incorect din partea mașinii.
Limitările detecției obstacolelor
Detecția obstacolelor ajută mașina să identifice anumite obiecte staționare și în mișcare. Aceste obiecte pot fi ați participați la trafic, de ex., pietoni sau alte vehicule, animale, bariere sau alte obiecte. Dacă acestea se află în apropierea sau în calea mașinii, atunci pot reprezenta un risc de coliziune. În funcție de circumstanțe mașina poate interveni sau avertiza în cazul în care obiectul este precis identificat. Pentru toate tipurile de obiecte pe care mașina le poate identifica, există mai mulți factori care pot preveni identificarea precisă. Exemplele de factori, situații și evenimente limitatoare includ:
- Obiectele apropiate spațial, suprapuse sau blocate parțial și participanții la trafic.
- Obiectele și participanții la trafic care se estompează în fundal.
- Obiectele și participanții la trafic care se deplasează sau accelerează rapid în mod special.
- Vehicule mai puțin obișnuite, de ex., bicicletele culcate, combinele sau remorcile cu încărcături de forme neregulate.
- Bicicletele de tipuri sau dimensiuni diferite în comparație cu o bicicletă normală de adulți.
- Mijloace noi de transport.
- Obiectele de îmbrăcăminte sau purtate, care modifică silueta unui pieton.
- Pietonii cu o înălțime de sub 80 cm (32 in).
- Obstacolele cu colțuri care pot crea o siluetă necunoscută.
- Dimensiunea și viteza animalelor. Pisicile și câinii au, deseori, o dimensiune prea mică pentru a fi identificați corect.
Notă
Exemple de detecție în trafic
Exemplele următoare de diferite scenarii din trafic vă pot ajuta să înțelegeți unele limitări ale sistemelor de detecție ale mașinii. Scenariile din viața reală sunt, deseori, mai complexe decât modelele ilustrative1 din acest manual.
În afara câmpului vizual și detecția întârziată
Diferitele zone de detecție din jurul mașinii sunt statice, fiecare având o zonă de acțiune și un câmp vizual limitate. În cazul în care ceva intră într-o zonă de detecție la un unghi neobișnuit, la viteză ridicată sau foarte aproape de mașină, se poate determina un răspuns rapid. Acest lucru reduce marjele de siguranță în comparație cu o situație în care, anterior, detecția a fost posibilă.
Important
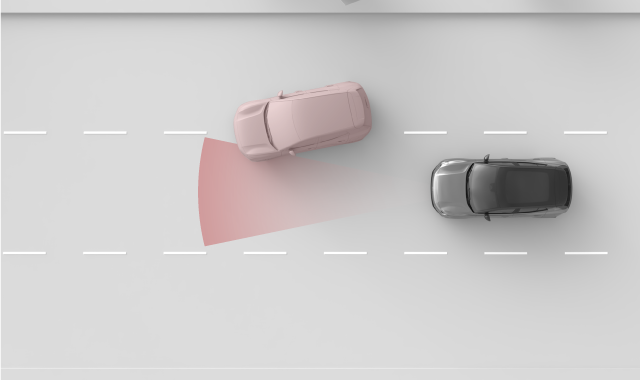
Amplasarea pe banda de rulare și vehiculele mici
Pentru detecția frontală, centrul benzii de rulare este mai favorabil în comparație cu părțile exterioare. Vehiculele pot merge nedetectate în cazul în care nu ocupă centrul benzii de rulare. Deși acest lucru se poate întâmpla pentru orice vehicul, riscul este mai mare pentru cele mici, de ex., motocicletele. Acestea ocupă o lățime mică a benzii și se pot deplasa mai mult în interiorul benzii. Acordați atenție vehiculelor care nu circulă pe centrul benzii de rulare.
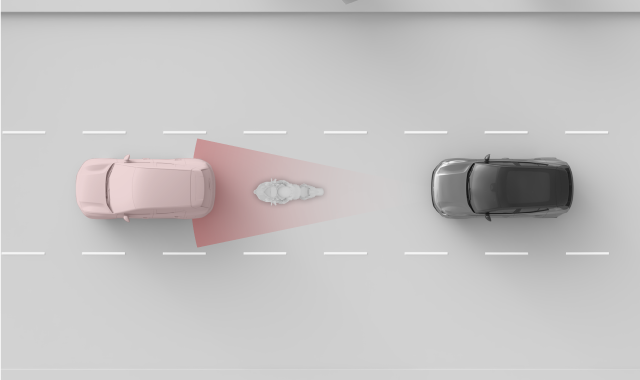
Forma, dimensiunea și numărul obiectelor
- Obiectele mici sunt mai greu de identificat.
- Cu cât sunt mai multe obiecte, cu atât mai greu este de a le identifica individual.
- Obiectele foarte apropiate care se suprapun sunt mai greu de evidențiat.
- Obiectele cu forme neuniforme, de ex., cu elemente aeriene sau protuberanțe, sunt mai greu de identificat.
Prezența unui vehicul de mari dimensiuni în față îngreunează identificarea semnăturii unui vehicul de dimensiuni mai mici, de ex., o motocicletă.
Important
Remorcă în față
În comparație cu multe alte vehicule de pe drum, detecția remorcilor este deseori mai puțin fiabilă din cauza formei și înălțimii. Acest lucru se aplică, în special, remorcilor înguste, remorcilor cu platformă joasă și remorcilor cu platforme de încărcare foarte înalte. Deseori, aceste tipuri de remorci nu au o suprafață suficientă la înălțimea la care se focalizează sistemele de detecție frontale.
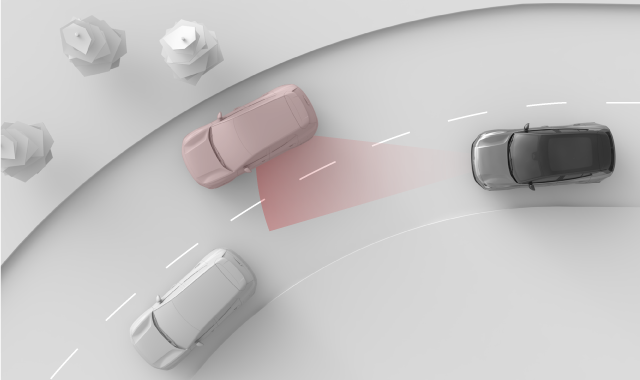
Șoseaua și infrastructura
Curbele de pe șosea determină interpretarea incorectă de către mașină a situației din trafic. De ex., se poate pierde urmărirea unui vehicul sau nu se poate identifica corect pe ce bandă de rulare se află vehiculul din față.
Important
Starea carosabilului și denivelările
- Virajele strânse și denivelările de pe carosabil pot obstrucționa temporar părți importante ale zonei din jurul mașinii de ex., alte vehicule sau marcaje rutiere.
- Mașina nu va putea identifica infrastructura rutieră nestandard sau neobișnuită. De ex., lucrările rutiere sau devierile de trafic pot duce la seturi de marcaje rutiere aflate în conflict sau multiplicate.
- Marcajele rutiere uzate sau indicatoarele rutiere pot să nu fie identificate corect.