Vozidlo sníma okolité objekty prostredníctvom množstva systémov a rôznych senzorov. Interpretácia zhromažďovaných údajov pomáha pri informovaní o jeho správaní, najmä funkcií podpory vodiča.
| Kamery | Kamery fungujú podobne ako ľudský zrak. Zachytený obraz sa používa na rôzne účely, čo závisí od kamery. Napríklad, horná kamera nasmerovaná dopredu pomáha vozidlu identifikovať rôzne objekty, napríklad dopravné značky a čiary na vozovke. Obraz zadnej parkovacej kamery sa zobrazuje na stredovom displeji. |
| Radary | Radary využívajú rádiové vlny, pomocou ktorých získavajú informácie o okolí vozidla. Dokážu identifikovať vzdialenosť od objektov a určité aspekty ich pohybu. Tieto informácie sú nevyhnutné pre mnohé funkcie vo vozidle. |
| Lidar | Lidar využíva svetelné vlny, pomocou ktorých získava informácie o okolí vozidla. Dokáže zaznamenávať objekty na veľkú vzdialenosť pred vozidlom, ale dokáže zisťovať aj objekty v blízkosti. |
| Ultrazvukové parkovacie senzory | Tieto senzory využívajú zvukové vlny, pomocou ktorých zaznamenávajú relatívne blízke objekty. Vysielajú ultrazvukové impulzy, ktoré sa dokážu odraziť späť k senzorom v prípade, ak narazia na nejaký objekt. |
Ako systémy spolupracujú
Rôzne typy detekcie sa navzájom dopĺňajú. Niekedy sa používajú samostatne, niekedy spoločne.
Dôležité
Všeobecné obmedzenia detekcie a identifikácie
- Vozidlo nedokáže vždy zvládnuť nepredvídateľné alebo nezvyčajné situácie. Keď vozidlo nedokáže správne identifikovať prostredie alebo dopravnú situáciu, jeho reakcie nebudú presné.
- Poškodenie vozidla môže ovplyvniť detekciu a príslušné funkcie. Mnoho porúch dokáže vozidlo identifikovať samé, ale niektoré nie. Preto je dôležité, aby bolo vozidlo v dobrom stave a plne funkčné. Ak máte podozrenie na poruchu alebo ak spozorujete akékoľvek poškodenie vozidla, obráťte sa na autorizovaný servis Volvo.
- Obmedzujúce faktory a podmienky sa môžu zhodovať – a často sa aj zhodujú. Môžu sa spájať a v konečnom dôsledku interagovať spôsobom, ktorý povedie k nesprávnemu zásahu vozidla.
Obmedzenia pri detekcii prekážok
Detekcia prekážok pomáha vozidlu identifikovať niektoré nehybné a pohyblivé objekty. Môžu to byť iní účastníci cestnej premávky, napríklad chodci alebo iné vozidlá, zvieratá, zvodidlá alebo iné predmety. Ak sa v jazdnej dráhe vozidla alebo v jej blízkosti nachádzajú takéto objekty, môžu predstavovať riziko kolízie. Ak objekt možno presne identifikovať, v závislosti od okolností vás vozidlo môže upozorniť, prípadne zasiahne. Pre všetky typy objektov, ktoré vozidlo dokáže identifikovať, platí, že existuje množstvo faktorov zabraňujúcich presnej identifikácii. Medzi obmedzujúce faktory, situácie a udalosti patria:
- Objekty nachádzajúce sa tesne pri sebe, prekrývajúce sa alebo čiastočne zablokované objekty a účastníci cestnej premávky.
- Objekty a účastníci cestnej premávky, ktorí splývajú s pozadím.
- Objekty a účastníci cestnej premávky, ktorí jazdia alebo zrýchľujú mimoriadne rýchlo.
- Neobvyklé vozidlá, napríklad ležadlové bicykle, kombajny alebo prívesy s nákladom nezvyčajného tvaru.
- Bicykle iného typu alebo veľkosti v porovnaní s bežným bicyklom pre dospelých.
- Nové druhy dopravy.
- Oblečenie alebo prevážané predmety, ktoré ovplyvňujú siluetu chodca.
- Chodci nižší ako 80 cm (32 palcov).
- Prekážky naklonené takým spôsobom, že vytvárajú neznámu siluetu.
- Veľkosť zvierat a rýchlosť ich pohybu. Mačky a psy sú často príliš malé a nedajú sa spoľahlivo identifikovať.
Poznámka
Príklady detekcie v dopravných situáciách
Nasledujú príklady rôznych dopravných situácií, ktoré vám môžu pomôcť pochopiť niektoré obmedzenia detekčných systémov vozidla. Reálne situácie sú často zložitejšie ako ilustračné1 príklady v tejto príručke.
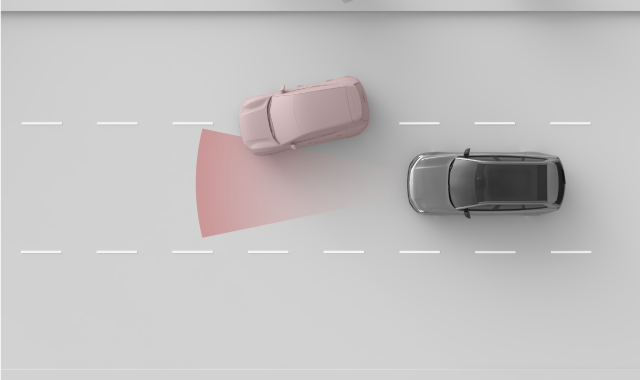
Objekt mimo zorného poľa a neskorá detekcia
Rôzne detekčné zóny okolo vášho vozidla sú statické, pričom každá má obmedzený dosah aj zorné pole. Ak nejaký objekt vojde do detekčnej zóny v nezvyčajnom uhle, vysokou rýchlosťou alebo veľmi blízko vášho vozidla, môže to spôsobiť rýchly zásah. V takejto situácii sú bezpečnostné rezervy menšie v porovnaní s prípadom, ak je možná včasnejšia detekcia.
Dôležité
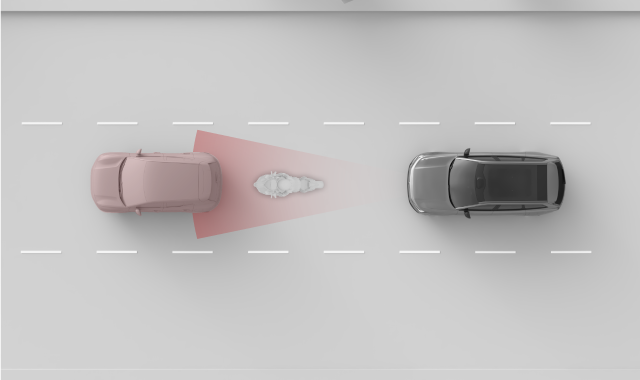
Poloha v jazdnom pruhu a malé vozidlá
Z pohľadu detekcie vozidiel vpredu je stred jazdného pruhu vhodnejší v porovnaní s krajnými časťami. Ak iné vozidlá nejazdia v strede jazdného pruhu, vaše vozidlo ich nemusí zaznamenať. Aj keď to môže byť prípad ľubovoľného vozidla, riziko stúpa pri malých vozidlách, napríklad pri motocykloch. Zaberajú menšiu časť šírky jazdného pruhu a v jazdnom pruhu sa môžu pohybovať viac. Vždy venujte zvýšenú pozornosť každému vozidlu, ktoré nejazdí v strede jazdného pruhu.
Tvar, veľkosť a počet objektov
- Malé predmety sa identifikujú ťažšie.
- Čím viac je predmetov, tým ťažšie možno identifikovať jednotlivé z nich.
- Ťažšie sa identifikujú objekty blízko seba, ktoré sa prekrývajú.
- Ťažšie sa identifikujú objekty nejednoznačných tvarov, napríklad s prečnievajúcimi časťami alebo vyčnievajúcimi predmetmi.
Prítomnosť veľkého vozidla vpredu môže sťažiť identifikáciu menšieho vozidla, napríklad motocykla.
Dôležité
Príves vpredu
Detekcia prívesov je v porovnaní s mnohými inými vozidlami na cestách často menej spoľahlivá kvôli ich tvaru a výške. Týka sa to najmä úzkych prívesov, nízkych prívesov a prívesov s veľmi vysokými nakladacími plošinami. Tieto typy prívesov často nemajú dostatočnú plochu vo výške, ktorú zaznamenávajú systémy detekcie vozidiel vpredu.
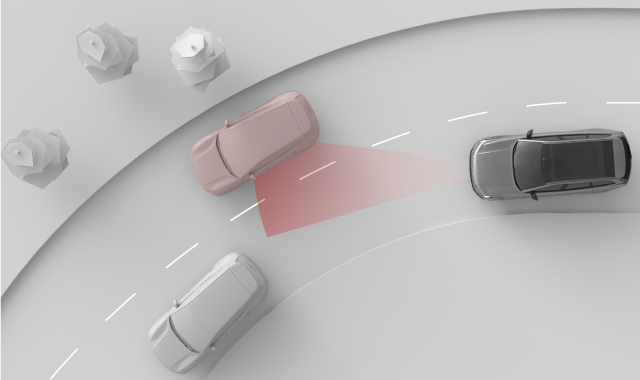
Cesta a infraštruktúra
Zákruty na ceste môžu spôsobiť, že vozidlo vyhodnotí dopravnú situáciu nesprávne. Môže napríklad stratiť vozidlo na dohľad alebo nesprávne identifikovať, v ktorom jazdnom pruhu jazdí vozidlo vpredu.
Dôležité
Stav vozovky a nerovnomernosti
- Ostré zákruty a nerovnosti na ceste môžu dočasne zakryť dôležité objekty v okolí vozidla, napríklad iné vozidlá alebo dopravné značky.
- Vozidlo nemusí správne identifikovať neštandardnú alebo nezvyčajnú cestnú infraštruktúru. Napríklad práce na ceste alebo odklonená doprava môžu viesť k vytvoreniu protichodných alebo viacnásobných čiar označenia jazdného pruhu.
- Vozidlo nemusí správne identifikovať opotrebované dopravné značenie alebo značky.