Aracınızın etrafındakileri anlayabilmesi, farklı tiplerde sensörler ve sistemler yoluyla sağlanır. Aracın topladığı verileri yorumlaması, özellikle sürücü desteği özellikleri için olmak üzere davranışlarına temel oluşturacak bilgileri sağlar.
| Kameralar | Kameralar, insan gözü gibi çalışır. Kamera ile yakalananlar farklı amaçlar için kullanılır, bu da kameraya bağlıdır. Örneğin, üstteki önü gören kamera, aracın trafik levhaları ve yol işaretleri gibi şeyleri tanımlamasına yardımcı olur; arka park kamerasının yakaladıkları ise ekranda gösterilir. |
| Radarlar | Radarlar aracın çevresi hakkında bilgi toplamak için radyo dalgaları kullanır. Nesnelere olan mesafeyi ve hareketlerinin belirli yönlerini tanımlayabilirler. Bu bilgiler araçtaki birçok özellik için önemlidir. |
| Ultrasonik park sensörleri | Bu sensörler, görece olarak yakın nesneleri tespit etmek için ses dalgalarını kullanır. Bunlar, bir nesne ile karşılaştığında sensörlere geri gelebilen ultrason atımları göndererek çalışır. |
Sistemler bir arada nasıl çalışır
Farklı tespit tipleri birbirini tamamlar. Bazı durumlarda tek başına, bazı durumlarda ise bir arada kullanılırlar.
Önemli
Genel tespit ve tanımlama kısıtlamaları
- Araç, öngörülemeyen veya olağandan farklı durumları her zaman yönetemeyebilir. Araç, çevreyi veya trafik durumunu doğru şekilde tanımlamakta zorlandığında, yanıtının doğruluğu bundan etkilenir.
- Araçtaki hasar, tespiti ve tespite bağlı özellikleri etkileyebilir. Araç, birçok arızayı tanımlayabilir; ancak bazı arızaların araç tarafından tanımlanması mümkün olmayabilir. Bu nedenle, aracın iyi durumda ve çalışır halde olduğundan emin olmak çok önemlidir. Herhangi bir arıza olduğundan şüphelenirseniz veya araçta hasar olduğunu fark ederseniz yetkili Volvo servisi ile iletişime geçin.
- Sınırlayan etkenler ve koşullar aynı zamana denk gelebilir ve sıklıkla gelir. Bunlar birleşip aracın yanlış bir tepki vermesine yol açacak şekilde etkileşime girebilirler.
Engel tespiti sınırlamaları
Engel tespiti aracın belirli sabit ve hareket eden nesneleri tespit etmesine yardım eder. Bu nesneler yayalar ve diğer araçlar gibi yolu kullanan diğer kişiler, hayvanlar, bariyerler veya diğer nesneler olabilir. Aracın sürüş yolunun içinde veya yakınında olan nesneler bir çarpışma riski oluşturabilir. Nesne doğru bir şekilde tespit edilirse, araç koşullara bağlı olarak sürücüyü uyarabilir veya müdahale edebilir. Aracın tespit edebildiği tüm nesne tiplerinin doğru tespitini önleyebilen birçok etken vardır. Sınırlayan etkenler, durumlar ve olaylara örnekler:
- Yakın aralıklı, çakışan veya kısmen bloklanan nesneler ve yolu kullanan kişiler.
- Arka plana karışan nesneler ve yolu kullanan kişiler.
- Özellikle çabuk hareket eden veya hızlanan nesneler ve yolu kullanan kişiler.
- Yatık bisikletler, biçerdöverler veya garip şekilli yük taşıyan römorklar gibi sıra dışı taşıtlar.
- Standart bir yetişkin bisikletine kıyasla farklı tipte veya boyutta bisikletler.
- Yeni ulaşım şekilleri.
- Bir yayanın silüetini değiştiren kıyafetler ve taşınan nesneler.
- 80 cm'den (32 inç) kısa yayalar.
- Bilinmeyen bir silüet oluşturacak şekilde açılı olan engeller.
- Hayvanların boyutu ve hızı. Kediler ve köpekler genellikle güvenilir bir şekilde tespit edilemeyecek kadar küçüktür.
Not
Trafik tespiti örnekleri
Aşağıdaki farklı trafik senaryosu örnekleri, aracınızın tespit sisteminin bazı sınırlamalarını anlamanıza yardımcı olabilir. Gerçek senaryolar genelde bu kılavuzda verilen aşağıdaki açıklayıcı1 örneklerden daha karmaşık olur.
Görüş alanın dışı ve geç tespit
Aracınızın çevresindeki çeşitli tespit alanları statiktir ve her alanın kısıtlı menzili ve görüş alanı vardır. Bir şey tespit alanına olağandışı bir açıdan, yüksek hızda veya aracınıza çok yakından girerse, hızlı bir tepkiye neden olabilir. Bu, güvenlik paylarını daha erken tespitin mümkün olduğu bir duruma kıyasla azaltır.
Önemli
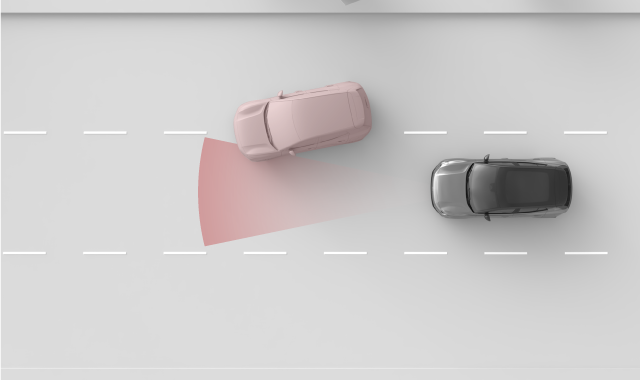
Şerit konumu ve küçük taşıtlar
Şeridin ortası ön tespit için dış kısımlarına göre daha elverişlidir. Şeridin ortasında bulunmayan taşıtlar tespit edilmeyebilir. Bu her taşıt için geçerli olsa da, risk motosikletler gibi küçük taşıtlar için daha yüksektir. Şeridin genişliğinin daha küçük bir kısmını kaplarlar ve şerit içinde sağa ve sola hareket edebilirler. Şeridin ortasında gitmeyen taşıtlara her zaman çok dikkat edin.
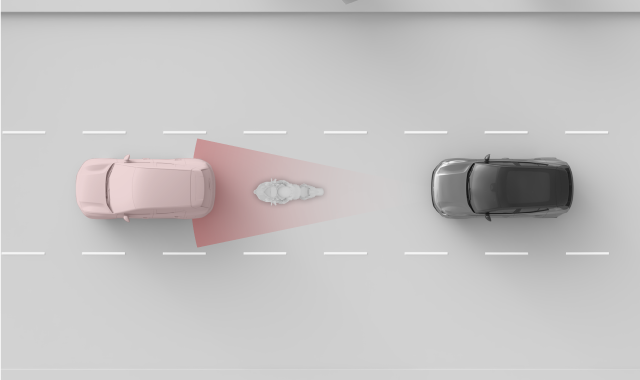
Nesnelerin şekli, boyutu ve sayısı
- Küçük nesnelerin tespiti daha zordur.
- Ne kadar çok nesne olursa, nesneleri teker teker tespit etmek o kadar zorlaşır.
- Örtüşen, birbirine yakın nesnelerin tespiti daha zordur.
- Çıkıntılara veya sarkan kısımlara sahip düzenli olmayan nesnelerin tespiti daha zordur.
İleride büyük bir aracın varlığı bir motosiklet gibi daha küçük bir aracı tanımlamayı zorlaştırabilir.
Önemli
Öndeki römork
Şekilleri ve yükseklikleri nedeniyle römorkların tespiti genelde yoldaki diğer birçok taşıta kıyasla daha az isabetlidir. Bu, özellikle dar römorklar, alçak römorklar ve çok yüksek yük yatağı olan römorklar için geçerlidir. Bu tipteki römorklar genellikle ön tespit sistemlerinin odaklandığı yükseklikte yeterli yüzey alanına sahip değildir.
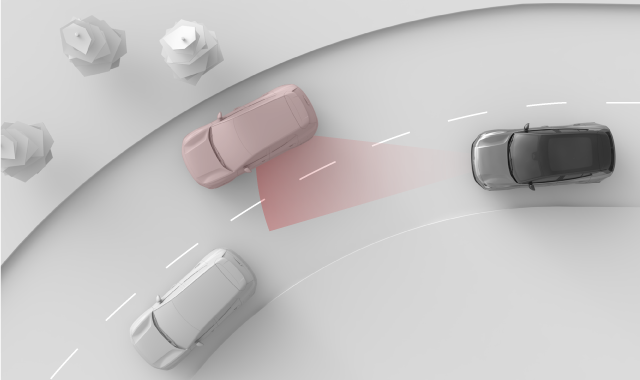
Yol ve altyapı
Yoldaki kıvrımlar aracın trafik durumunu yanlış yorumlamasına neden olabilir. Örneğin, bir aracı takip etmeyi bırakabilir ya da öndeki bir aracın hangi şeritte olduğunu yanlış tanımlayabilir.
Önemli
Yol durumu ve düzensizlikler
- Yoldaki keskin virajlar ve tümsekler aracın çevresinin diğer araçlar ve yol işaretleri gibi önemli kısımlarını geçici olarak bloklayabilir.
- Standart olmayan veya alışılmadık yol altyapısı araç tarafından doğru bir şekilde tanımlanmayabilir. Örneğin, yol çalışmaları ve servis yolları çatışan veya birden fazla yol işareti grubuna yol açabilir.
- Aşınmış yol işaretleri veya levhaları doğru bir şekilde tanımlanmayabilir.