Geriye doğru
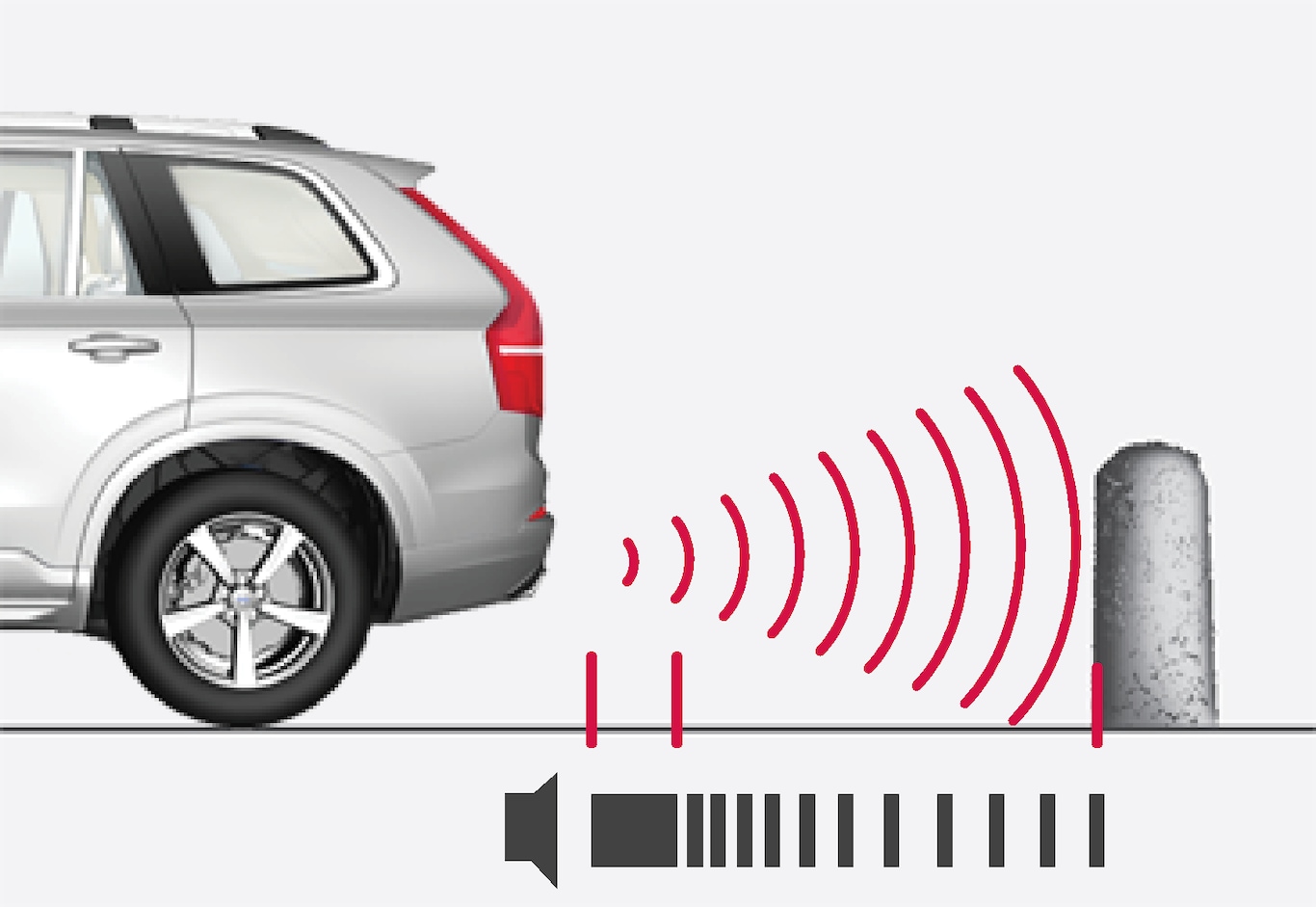
Geri gidiş sensörleri, herhangi bir vites devrede olmadan araç geriye doğru kaydığında veya vites kolu geri vitese getirildiğinde etkinleşir.
Ölçüm mesafesi aracın yaklaşık 1,5 metre ( 5 ft) arkasında başlar.
Bağlı bir römorkla geri giderken geri doğru park yardımı otomatik olarak devre dışı bırakılır.
Not
Kenarlar boyunca

Park yardımı yan sensörleri, motor çalıştırıldığında otomatik olarak etkinleşir. Bunlar, 10 km/sa (6 mph) altındaki hızlarda aktiftir.
Ölçüm menzili yanlardan yakl. 30 cm (1 ft) mesafeden başlar. Yanlardaki engeller için verilen sesli sinyal, yan hoparlörlerden gelir.
Öne doğru
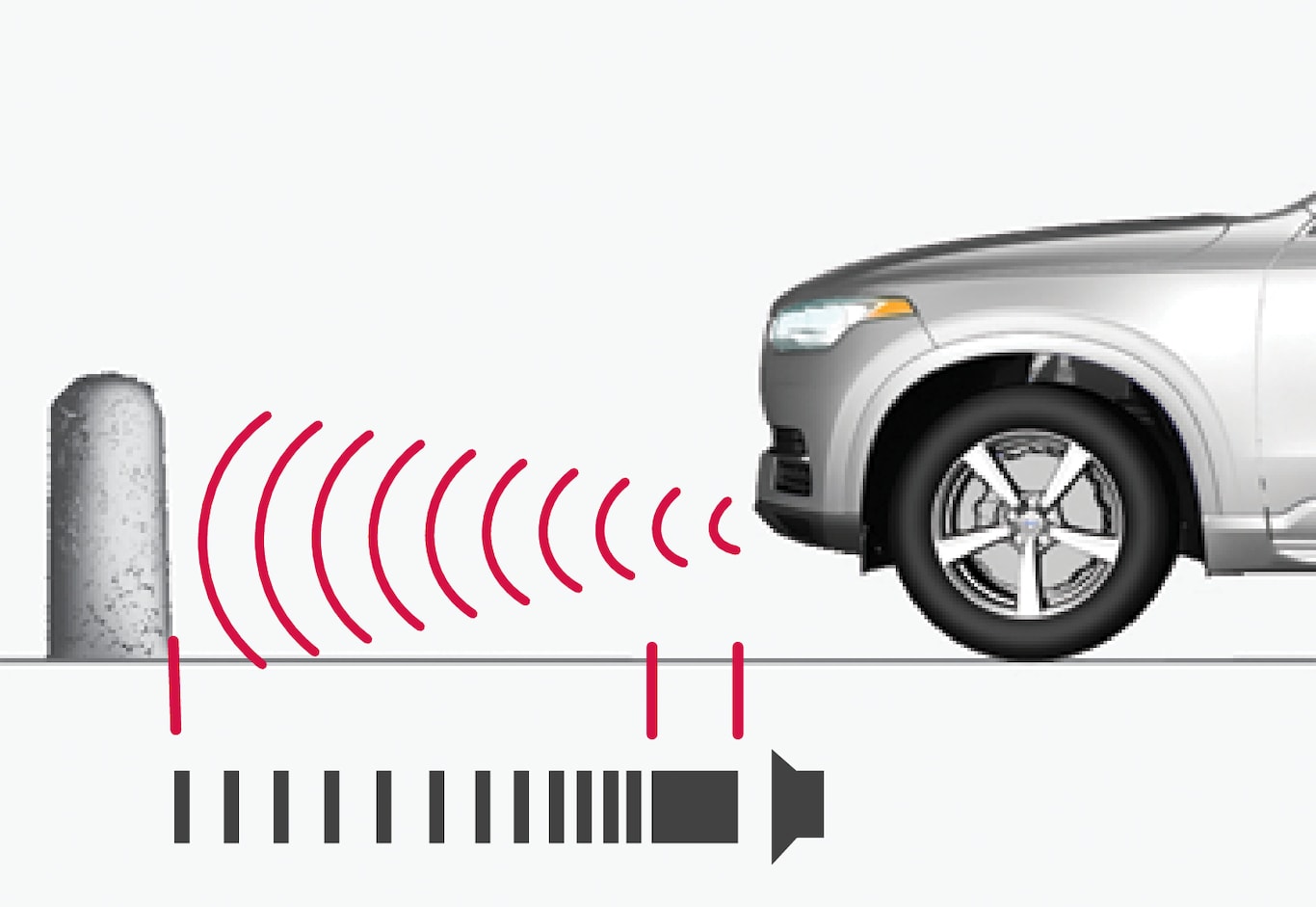
Ön park yardımı sensörleri, motor çalıştırıldığında otomatik olarak etkinleşir. Bunlar, 10 km/sa (6 mph) altındaki hızlarda aktiftir.
Ölçüm mesafesi aracın yaklaşık 80 cm (2,5 ft) önünde başlar.