Bu fonksiyon alanı ölçer ve arabayı yönlendirir - sürücünün işi:
- araçta neler olup bittiğini bir göz atmak
- orta ekrandaki talimatları izlemek
- bir vites seçer (geri / ileri) - bir "pling" sesi sürücünün vites değiştirmesi gerektiğini gösterir
- güvenli bir hızı düzenlemek ve sürdürmek
- frenleme ve durma.
Farklı adımlar gerçekleştirildiğinde, orta ekranda semboller, grafikler ve / veya metinler görünür.
- Araca takılı römork yoktur
- Hız 30 km/sa (20 mph) altındadır.
Not
Park etme
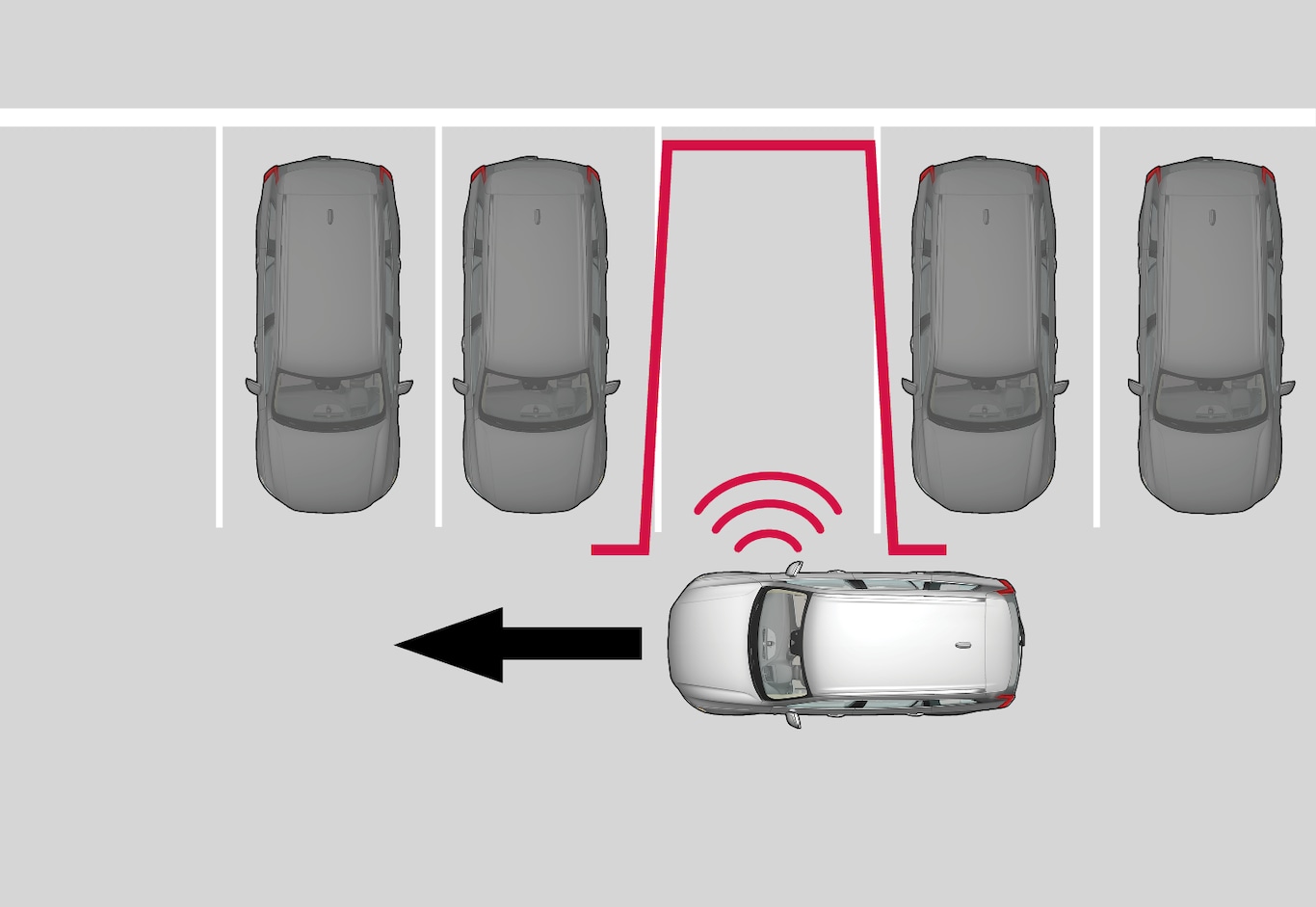
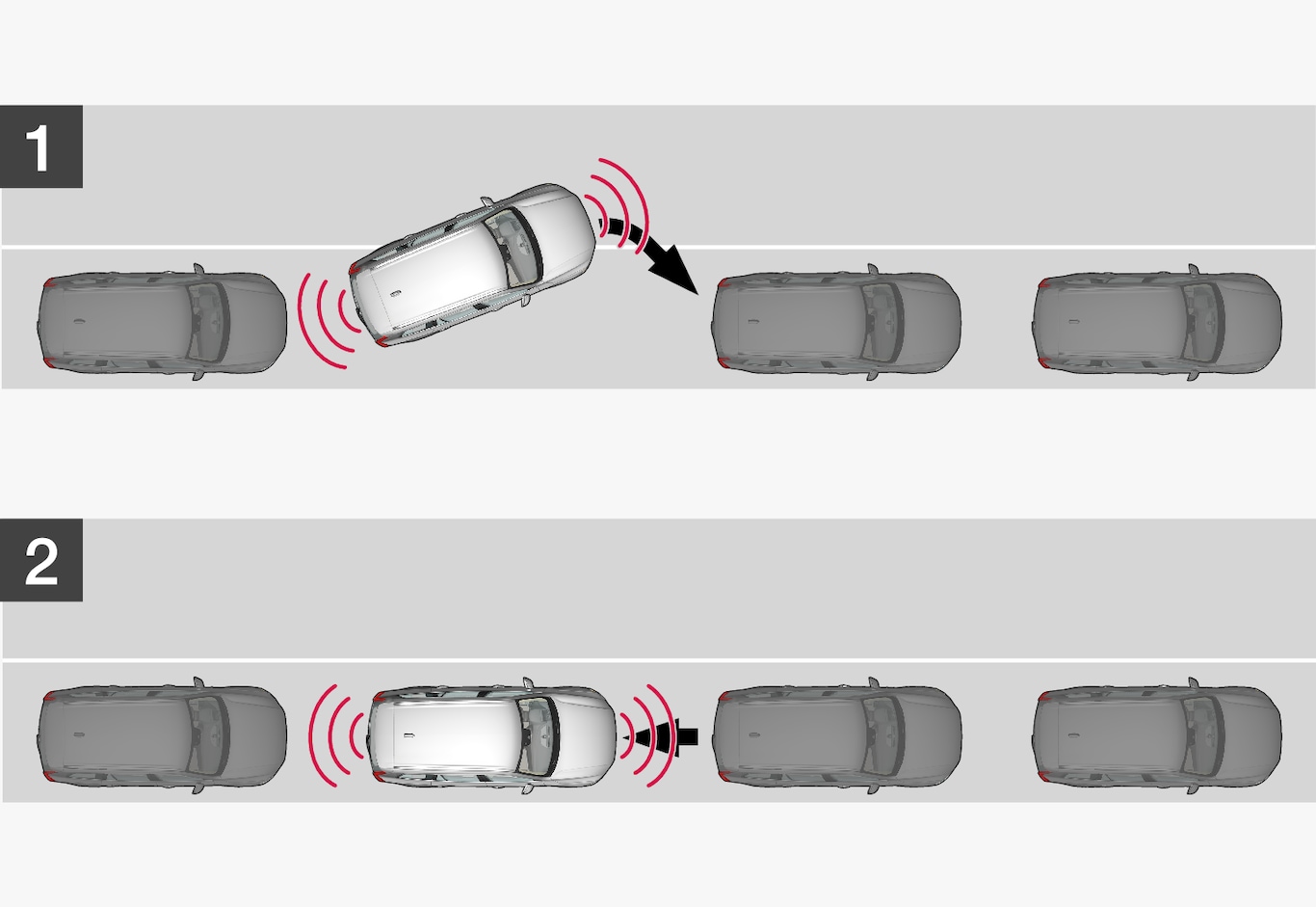
- Bir park yeri belirlenir ve ölçülür.
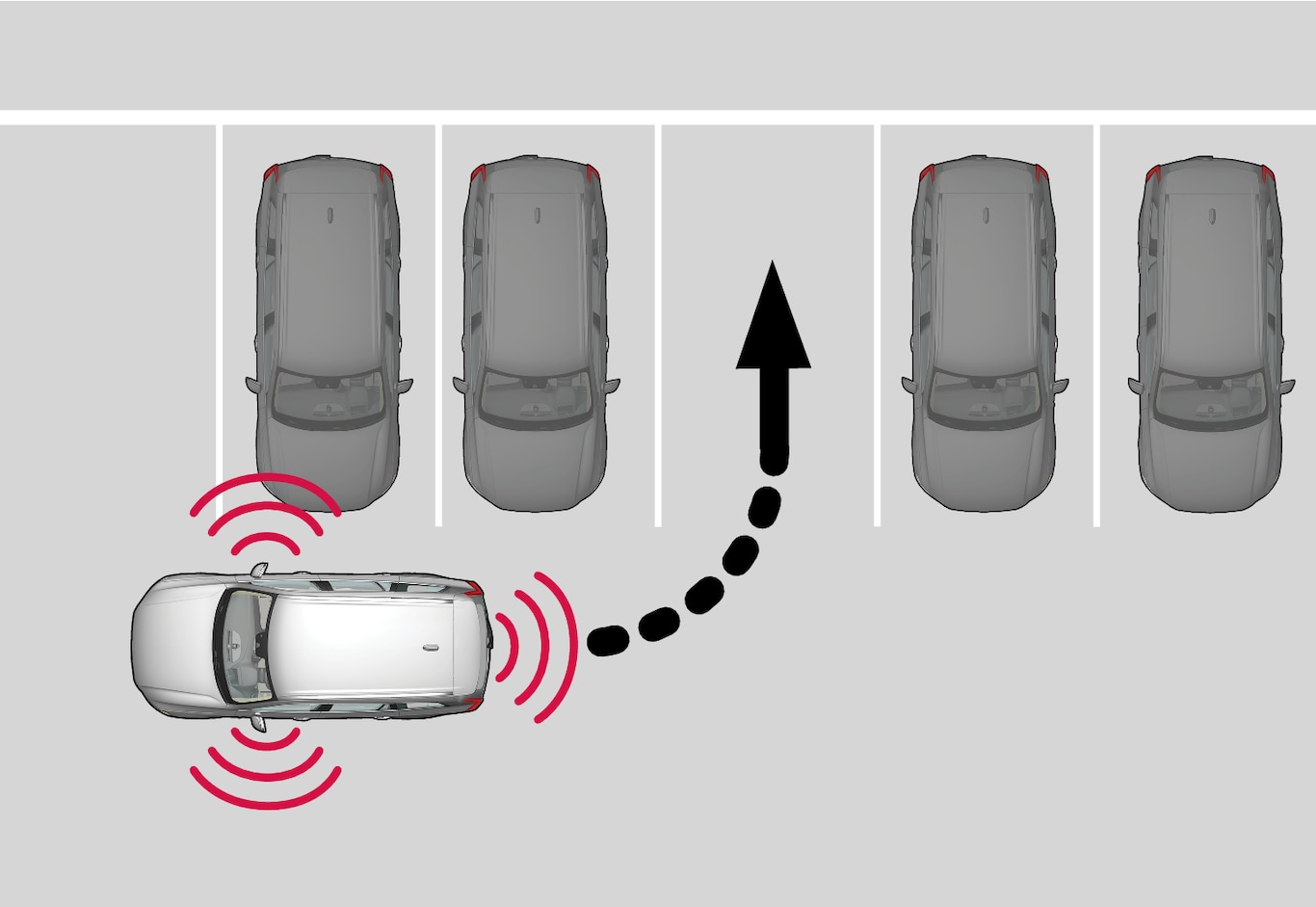
- Araç, geri gidiş sırasında alana yönlendirilir.
- Araç boş yere yerleştirilir - sistem daha sonra sürücüden vites değiştirmesini ve frenlemesi talep edebilir.
Park yerlerinin bulunması ve ölçülmesi

İşlev, orta gösterge ekranının işlev görünümünden etkinleştirilebilir.
Buna kamera görünümlerinden de erişilebilir.
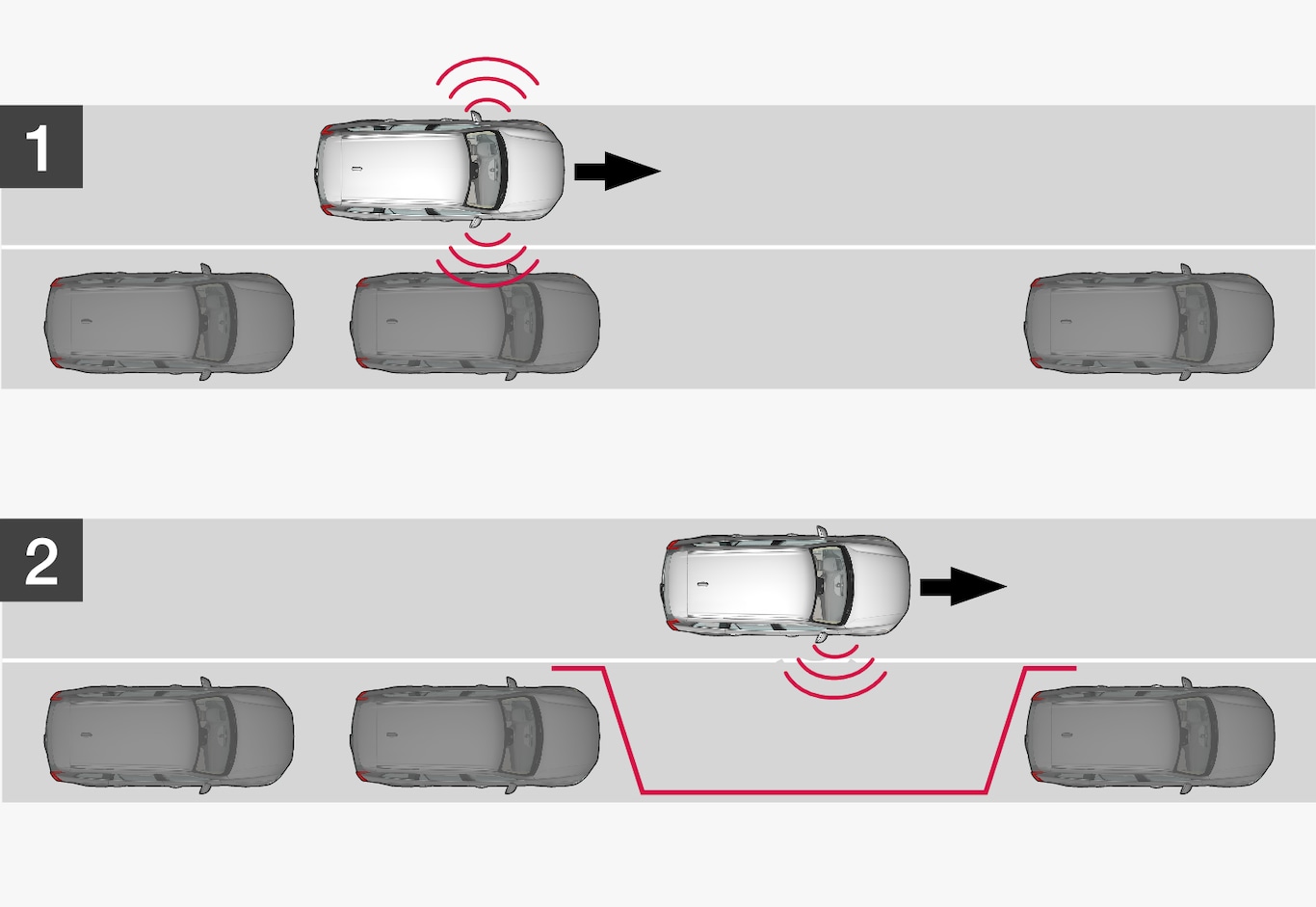
Paralel park için azami 30 km/sa (20 mil/saat) veya dikey park için 20 km/sa (12 mil/saat) hızla sürün.
Not
Fonksiyon park edilecek yer arar, talimatları görüntüler ve araca yolcu tarafından aracı yönlendirir. Fakat gerekli olması halinde araç yolun sürücü tarafına da park edilebilir:
- Sürücü tarafındaki sinyal lambasını etkinleştirin, sistem bu durumda aracın bu tarafında bir park alanı aramaya başlar.
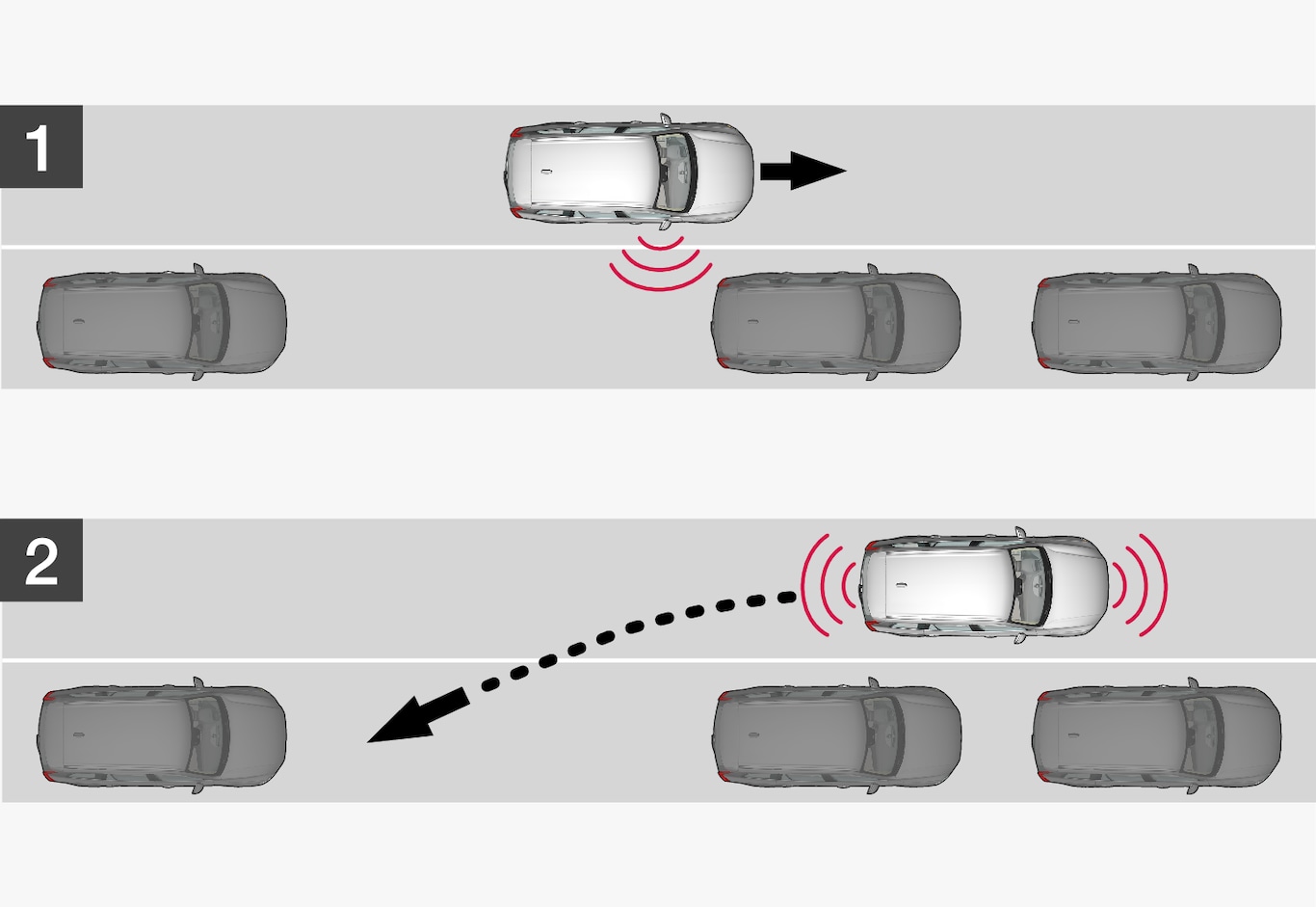
Bir park yerine geri giriş
Not
- Fonksiyon etkinleştirildiğinde ellerinizi direksiyondan çekin.
- Direksiyonun hiçbir şekilde aksamadığından ve serbestçe döndüğünden emin olun.
- Optimum sonuçlar için - Geriye/ileriye doğru sürmeye başlamadan önce direksiyon simidi döndürülene kadar bekleyin.
Aracın park yerine yerleştirilmesi

İşlev otomatik olarak devreden çıkar ve grafikler ile mesaj, parkın tamamlandığını gösterir. Sürücünün konumlanmayı düzeltmesi gerekebilir. Arabanın düzgün biçimde park edilip edilmediğini yalnızca sürücü belirleyebilir.