PAP 程序在下述情形下會停止:
會有一段文字訊息指出 PAP 程序在何處停止。
注意
遮蔽感知器的塵土、冰、雪會降低其功能且可能會使測量工作無法進行。
重要
在某些情況下,PAP 會無法尋找停車空間 - 感知器被發出的超音波頻率和系統使用之頻率相同的外部音源干擾是可能的原因之一。
這類來源的例子包括喇叭、行駛在柏油上的溼輪胎、氣動煞車及機車所發出的排氣噪音等等。
請注意
駕駛人必須牢記在心:駐車輔助領航功能只是一種輔助功能,並非萬無一失的全自動功能。因此,駕駛人必須做好介入的準備。停車時也要記得一些細節,如:
- PAP 會從停放車輛目前的位置開始 - 如果停放方式不當,則汽車的輪胎及輪圈可能會撞上路緣而受損。
- PAP 是為了在筆直街道上停車而設計的,並非用於在急轉彎或彎道上停車。基於這個理由,當 PAP 測量空間時,請確保汽車與駐車空間是平行的。
- 因為沒有足夠的操作空間,在狹窄的街道上不一定能找到停車位。在這種停車狀況下,盡可能駛近您想停靠的那一側可協助系統駕駛。
- 請記得,停車時,汽車前端可能會進入對向車流。
- 在進行駐車操作的計算時,並未納入位置高於感知器偵測區的物體。這會造成 PAP 太早駛入駐車空間 - 基於此原因,應避免使用此類停車場。
- 駕駛人必須負責判斷 PAP 所選擇的空間是否適合停車。
- 請以正確胎壓使用經批准的輪胎3,因為這會影響到 PAP 停車的能力。
- 大雨或大雪可能會使系統無法正確測量停車空間。
- 安裝雪鏈或備用輪胎時,請勿使用 PAP。
- 裝載物品突出車外時,請勿使用 PAP。
重要
更換成其他經核准的輪圈和/或輪胎尺寸可能會使輪胎圓周改變,因此可能需要更新 PAP 系統的參數。請洽詢維修中心 - 我們建議您洽詢 Volvo 授權維修中心。
保養
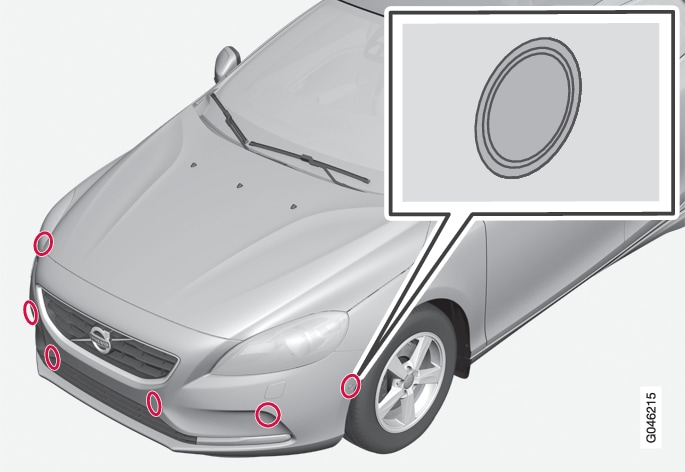
為確保PAP功能的正確運作,必須定期以水與汽車清潔劑清理其感知器。