平行停車
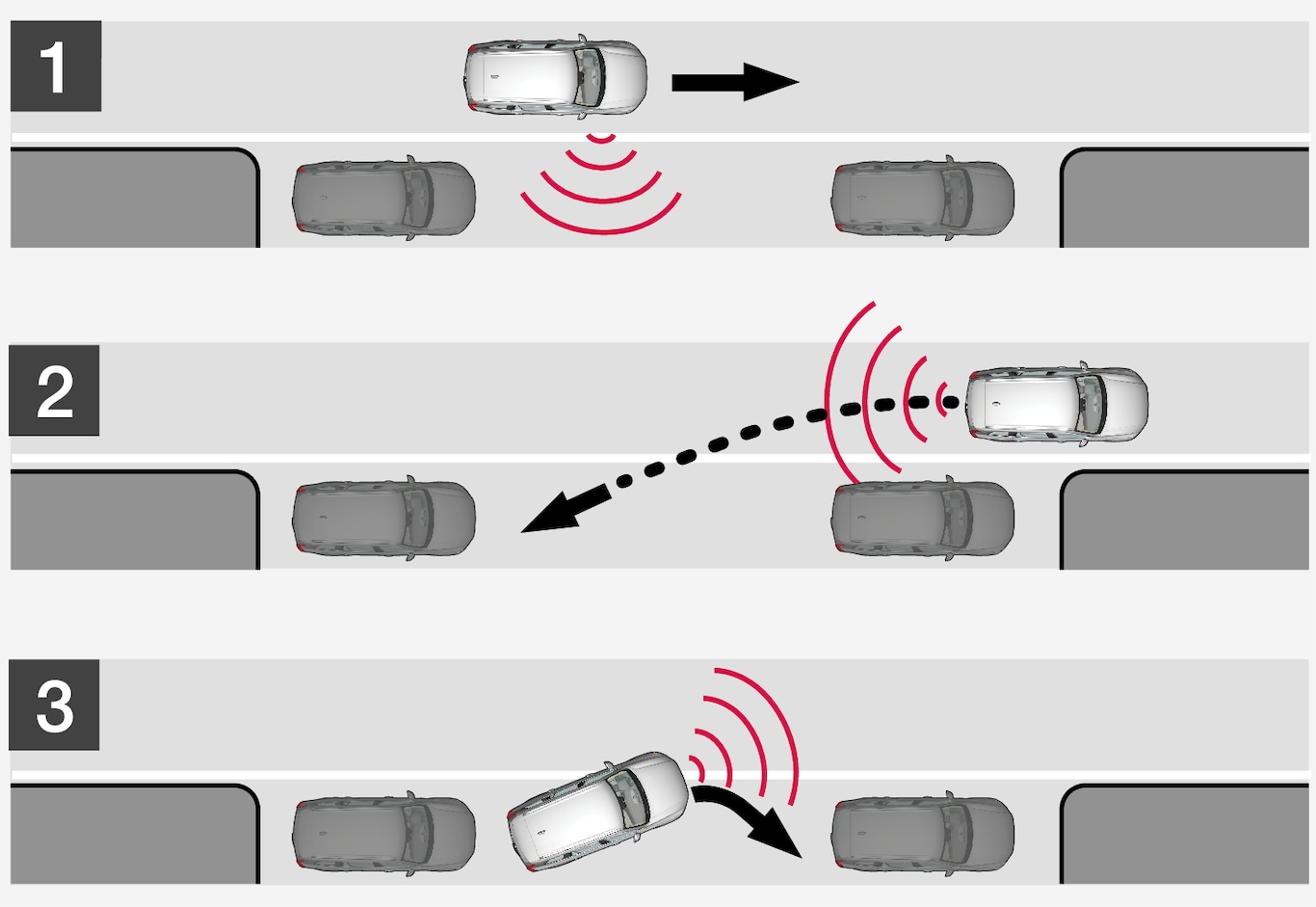
PAP 功能利用下述步驟停車:
- 找到並測量停車格。
- 車輛會在倒車時轉入停車格。
- 車輛經由向前/向後開動進入停車格。
使用駛離停車位置功能,PAP也可協助平行停放車輛使離停車位 - 請參閱「在主動式駐車輔助下停車」一節中的「駛出停車格」標題。
直角停車
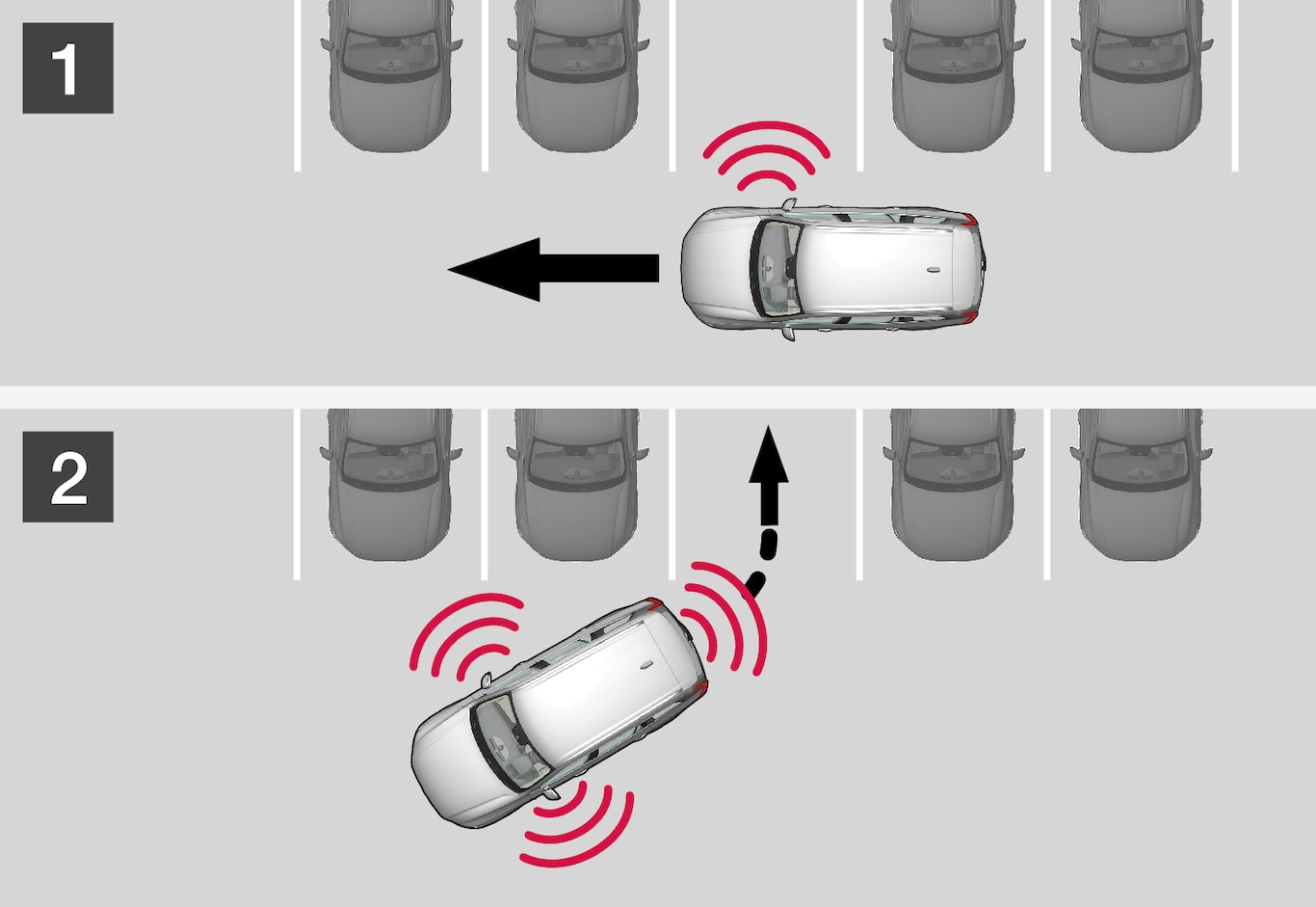
PAP 功能利用下述步驟停車:
- 找到並測量停車格。
- 系統會於車輛倒車時將之導引進入停車格,並藉由前/後駛動挪入停車格。
注意
PAP 駛離停車位置無法協助垂直停放車輛駛離停車格 - 此功能只能用於平行停放車輛。
使用駛離停車位置功能,PAP也可協助平行停放車輛使離停車位 - 請參閱「在主動式駐車輔助下停車」一節中的「駛出停車格」標題。