Rear Auto Brake (RAB)和Cross Traffic Alert (CTA)*功能只在車輛向後滑動或已打入倒車檔時有作用。
如果偵測到障礙物:
- 警告訊號和駐車輔助圖形會點亮,以指出障礙物的位置。
- 如果駕駛人忽視警告,而且碰撞無法避免,汽車可能會自動煞車,並顯示一則說明煞車原因的文字訊息。
如果用力踩下加速踏板,則汽車也會在自動煞車後倒車。
警告
- 這些功能是駕駛人支援輔助功能,其目的在於促進順利且安全的行駛 – 但無法處理所有交通、天氣及道路條件下的所有狀況。
- 建議駕駛人閱讀車主手冊中所有關於這些功能的段落,以得知此項功能的限制以及駕駛人在使用功能前應注意的事項。
- 駕駛人支援無法取代駕駛人的注意力及判斷能力。駕駛人必須負責確保車輛遵循現行交通法規,以適當車速安全行駛,並與其他車輛保持適當距離。
注意
這些功能使用汽車的攝影機和雷達單元,它們有一定的侷限性。
接近車輛後方的障礙物
Rear Auto Brake的目的是在倒車時,協助駕駛人偵測接近車輛後方的靜止障礙物。
此功能主要用於偵測高於後保險桿的靜止障礙物,例如靜止不動的車輛。
時速低於10 km/h (6 mph) 時,會啟動Rear Auto Brake煞車干預。
使用自動洗車機之前需要關閉自動煞車,也可能需要關閉以避免不必要的介入,例如在長草地倒車時。
側面障礙物
Cross Traffic Alert的目的是在倒車時,協助駕駛人注意橫向車流。
此功能在設計上主要是用來偵測移動中的較大型車輛。狀況較佳時,此功能也可偵測到較小的物體,例如自行車騎士及行人。
時速低於15 km/h (9 mph) 時,會啟動Cross Traffic Alert煞車干預。
使用自動洗車機之前需要關閉自動煞車,也可能需要關閉以避免不必要的介入,例如在長草地倒車時。
偵測和限制範例
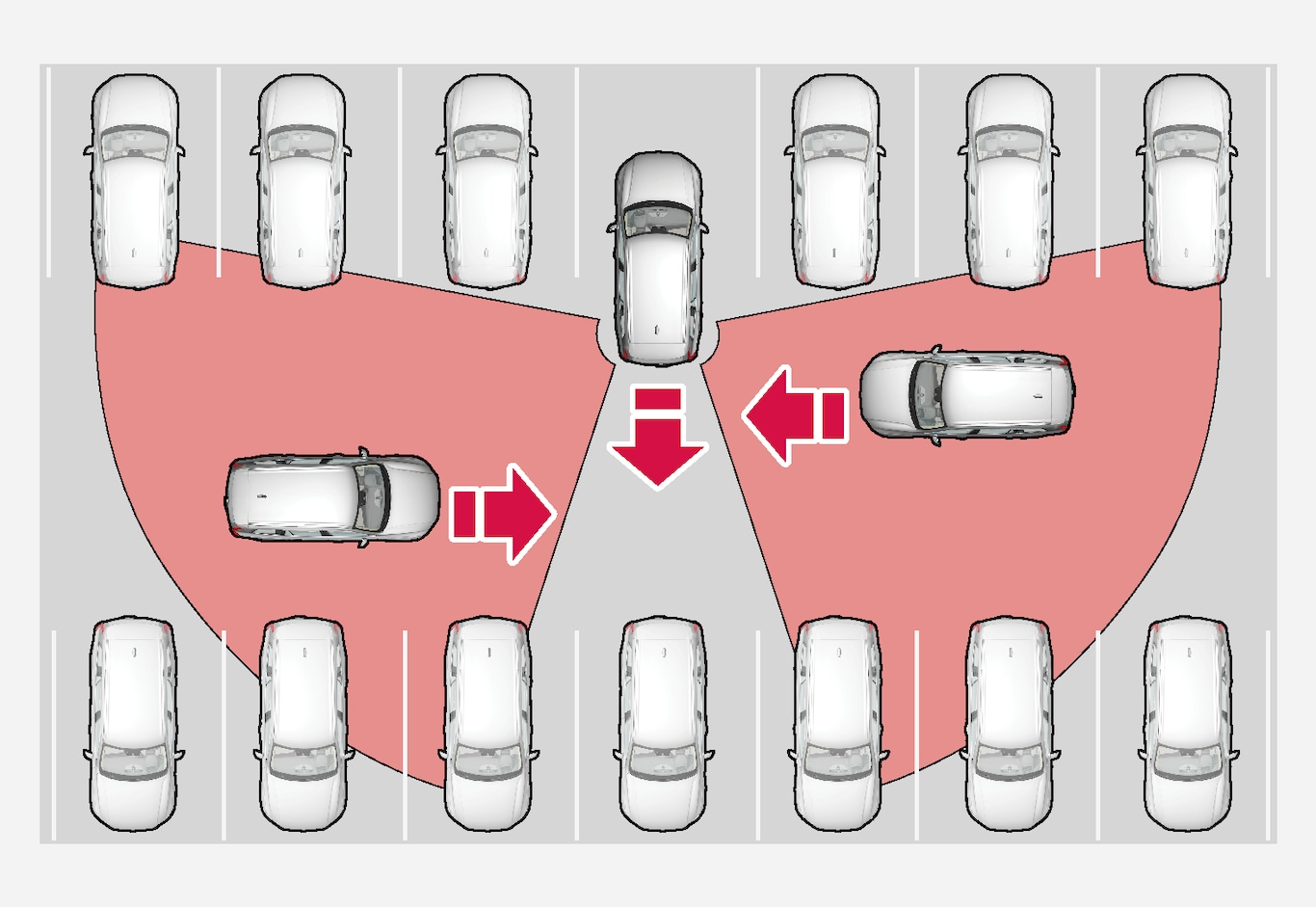
此功能的感測器無法偵測到被其他停放的車輛或大型障礙物擋住的車流。對於只有在非常接近時才能偵測到的接近車輛,以下提供一些說明範例。
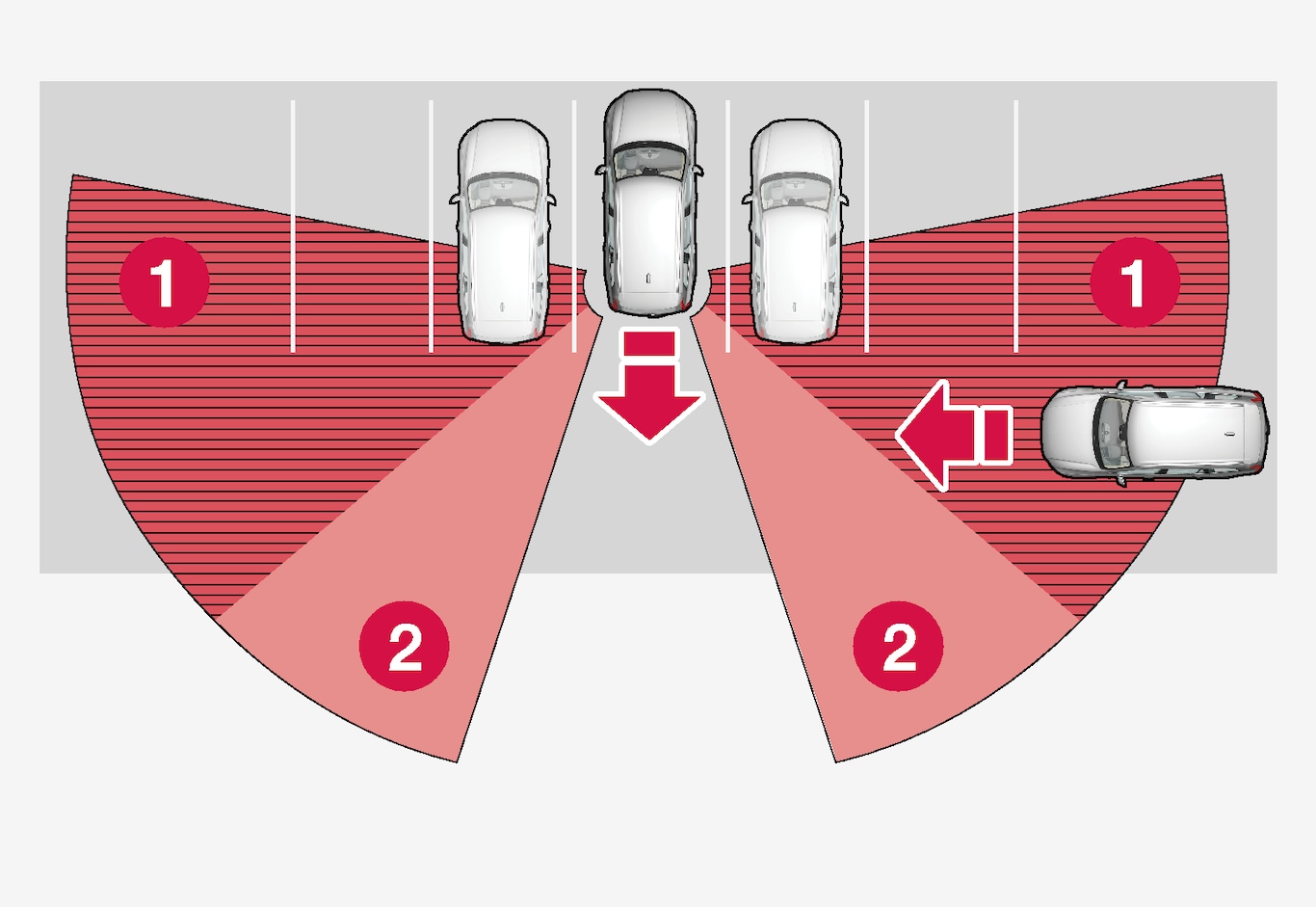
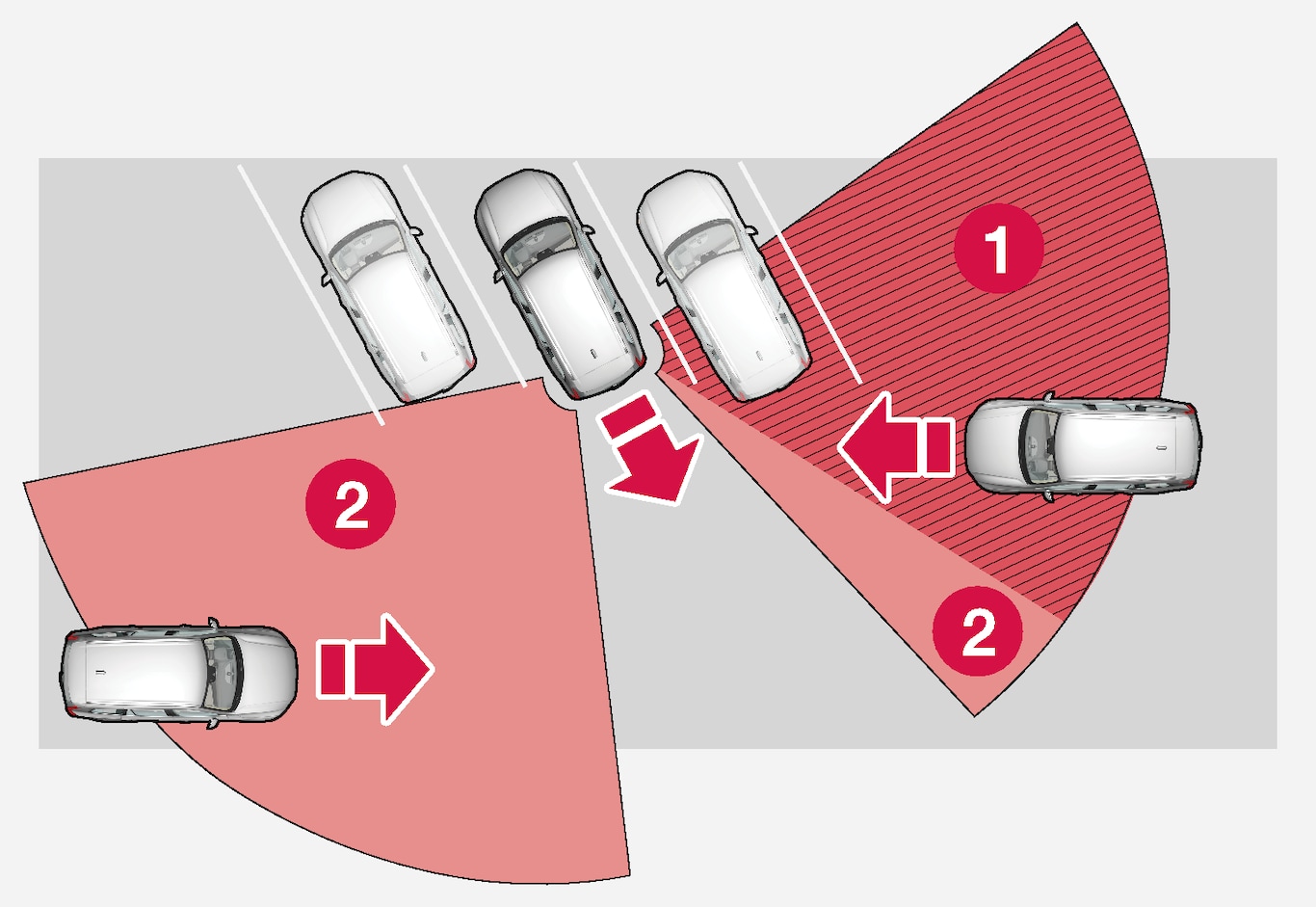
 死角
死角 此功能可偵測的區域。
此功能可偵測的區域。
然而,當緩慢倒車時,角度會隨著受阻擋的車輛/物件而改變,並且會迅速縮小盲點區。
設備連接到拖車桿時倒車
拖車、自行車架或類似裝置連接到拖車桿接頭時,RAB和CTA會自動關閉。若連接的設備沒有電氣連接,必須按下整合觸控螢幕中控台內的按鈕,手動關閉RAB和CTA。