PAP會先確認停車格是否夠大,而後協助駕駛人轉動方向盤並將車身駛入停車格。
中央顯示器會顯示待執行動作的符號、圖形及文字及其執行時機。
注意
PAP 功能會測量空間並控制汽車轉向 - 駕駛人的任務是:
- 密切注意車輛周圍
- 遵循中央顯示器的上的指示
- 換檔(倒退/前進)
- 控制並維持安全車速
- 煞車停止。
警告
PAP 並不能在所有狀況下發揮作用,此系統在設計上只是一種補充輔助功能。
就在停車時以安全的方式駕駛汽車、注意週遭環境,並注意其他接近汽車或經過汽車的其他用路人而言,駕駛人永遠都必須負起最終的責任。
停車情況種類
PAP可用於以下不同停車情況。
平行停車
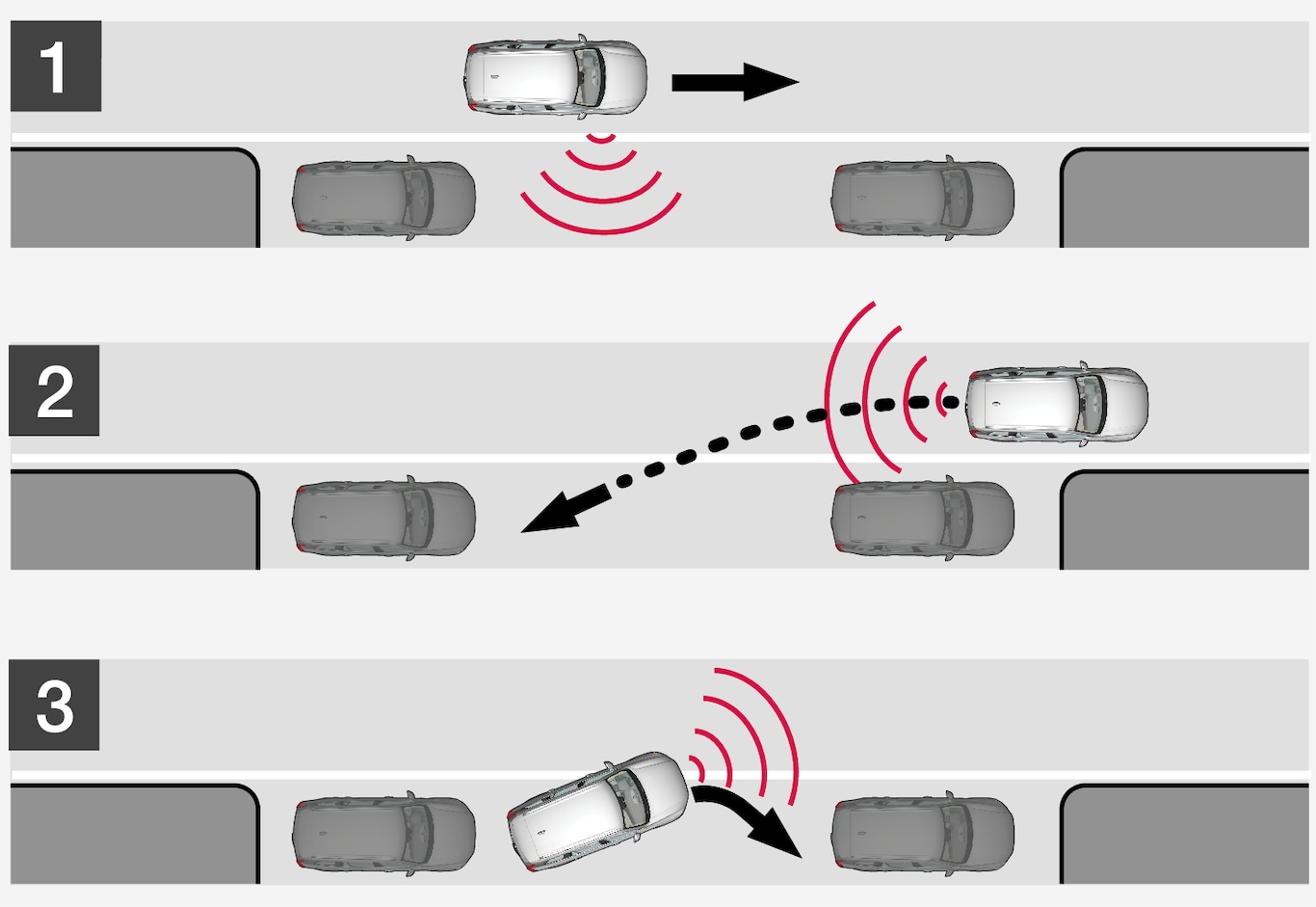
PAP 功能利用下述步驟停車:
- 找到並測量停車格。
- 車輛會在倒車時轉入停車格。
- 車輛經由向前/向後開動進入停車格。
使用駛出停車位功能,PAP也可協助平行停放車輛使離停車位 - 請參閱「在主動式駐車輔助下停車」一節中的「駛出停車格」標題。
直角停車
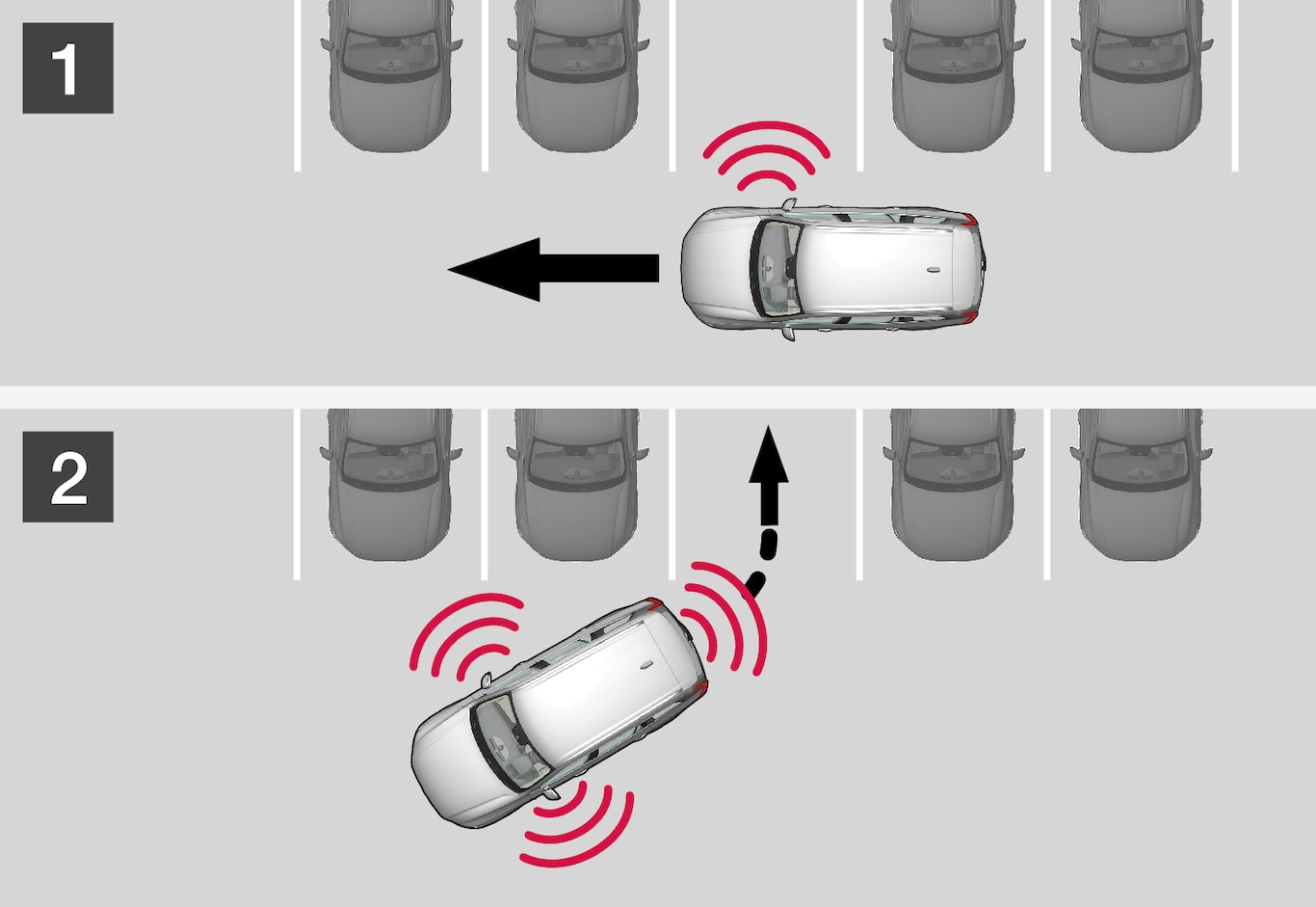
PAP 功能利用下述步驟停車:
- 找到並測量停車格。
- 系統會於車輛倒車時將之導引進入停車格,並藉由前/後駛動挪入停車格。
注意
PAP 駛出停車位無法協助垂直停放車輛駛離停車格 - 此功能只能用於平行停放車輛。