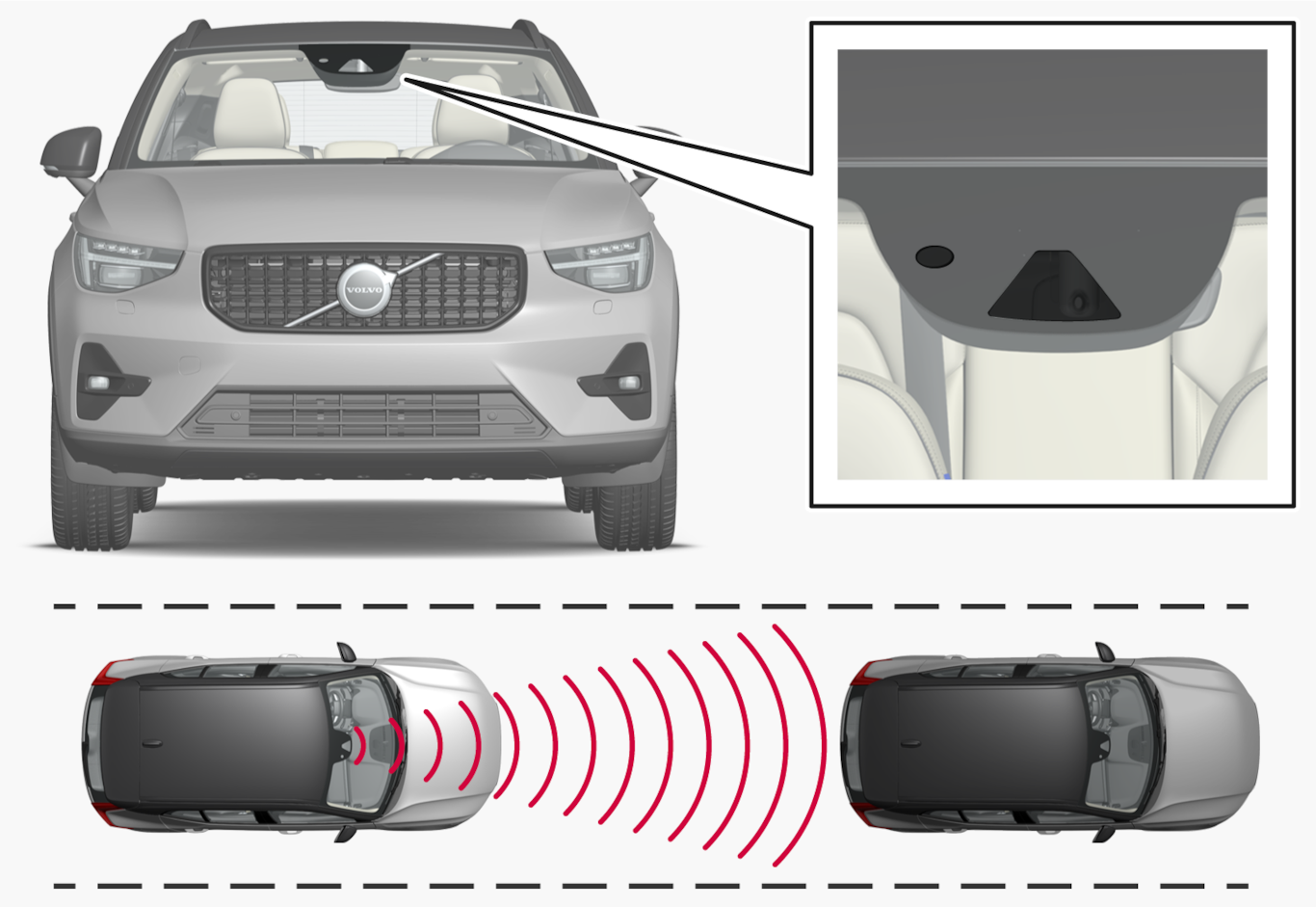
在高速公路及長直幹道上長途行駛時,主動車距控制巡航系統功能可使汽車駕駛起來更輕鬆。
駕駛人選擇想要的車速以及與前車的時間間隔。如果攝影機與雷達單元偵測到前車速度較慢,將透過預設時間間隔自動調整車速。當前方道路道路再次通暢時,汽車就會回到所選擇的速度。
主動車距控制巡航系統旨在:
- 以流暢方式調節車速。在需要緊急煞車的情況下,駕駛人必須自行煞車。這適用於速度差異大或者前車急煞車時。由於雷達單元的限制,可能會意外煞車或完全不煞車。
- 跟隨同車道內的前方車輛,並與該車維持駕駛人所設定的時間間隔。若雷達單元未偵測到前方有車,則車輛會維持駕駛人所儲存的速度。若前車的速度增加並超出儲存的速度,也會發生這種情形。
斜陡道路及/或重載
請記住,主動車距控制巡航系統主要用於在平坦路面上駕駛時。行駛於陡降坡時,此功能可能難以與前車保持正確距離 – 在這種情況下,請特別小心並隨時準備煞車。
車輛載重或加掛拖車時不可使用主動車距控制巡航系統。
警告
- 此功能並非避免碰撞的系統。駕駛人必須擔負全責,且若系統並未偵測到前方車輛,應介入處理。
- 此功能不會因為人、動物,或腳踏車、摩托車之類的小型車輛而煞車。也不用於高度較低的拖車、對面來車、慢行或停止不動的車輛或物體。
- 在例如市區行車時、經過十字路口時、行駛於濕滑道路時、路面積水或融雪時、下大雨/大雪時、能見度不佳時、行經蜿蜒道路或濕滑路面時等需要高度注意的狀況下,請勿使用此功能。
警告
- 此功能是一項駕駛人支援輔助功能,其目的在於促進順利且安全的行駛 – 但無法處理所有交通、天氣及道路條件下的所有狀況。
- 建議駕駛人閱讀車主手冊中所有關於此項功能的段落,以得知此項功能的限制以及駕駛人在使用系統前應注意的事項。
- 駕駛人支援無法取代駕駛人的注意力及判斷能力。駕駛人必須負責確保車輛遵循現行交通法規,以適當車速安全行駛,並與其他車輛保持適當距離。
注意
此功能使用汽車的攝影機和雷達單元,它們有一定的侷限性。
重要
駕駛人支援組件的保養僅限於在維修中心進行-建議交由Volvo授權維修中心處理。