在高速公路及長直幹道上長途行駛時,主動式定速巡航控制功能可使汽車駕駛起來更輕鬆。
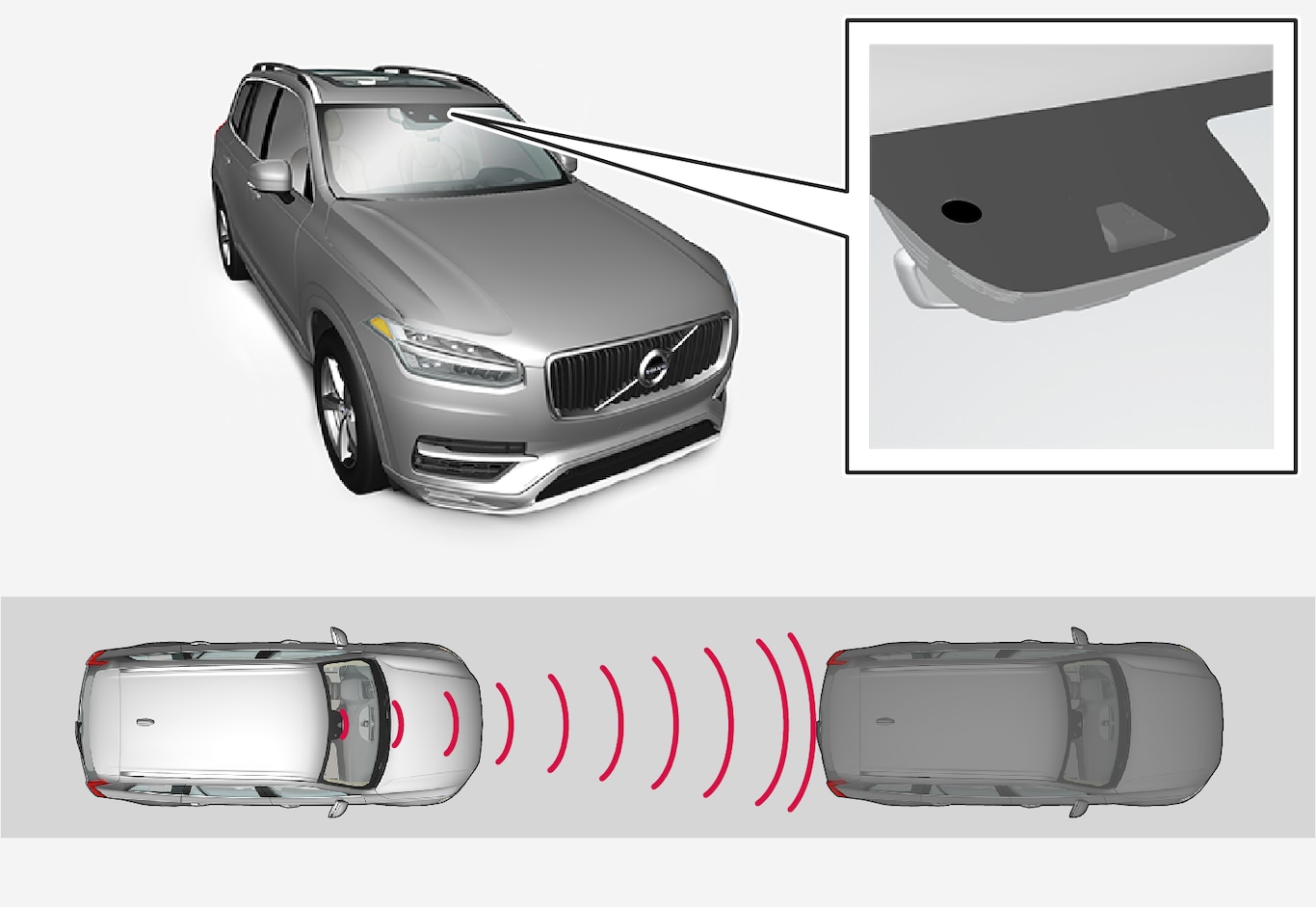
駕駛人選擇想要的車速以及與前車的時間間隔。如果攝影機與雷達單元偵測到前車速度較慢,將透過預設時間間隔自動調整車速。當前方道路道路再次通暢時,汽車就會回到所選擇的速度。
警告
- 此功能是一項駕駛人支援輔助功能,其目的在於促進順利且安全的行駛 – 但無法處理所有交通、天氣及道路條件下的所有狀況。
- 建議駕駛人閱讀車主手冊中所有關於此項功能的段落,以得知此項功能的限制以及駕駛人在使用系統前應注意的事項。
- 駕駛人支援無法取代駕駛人的注意力及判斷能力。駕駛人必須負責確保車輛遵循現行交通法規,以適當車速安全行駛,並與其他車輛保持適當距離。
主動式定速巡航控制會利用加速與制動來調控車速。使用煞車調整車速時,煞車發出些微聲響屬於正常狀況。
主動式定速巡航控制目的在於以平穩方式控制速度。在需要緊急煞車的情況下,駕駛人必須自行煞車。這適用於速度差異大或者前車急煞車時。由於雷達單元的限制,可能會意外煞車或完全不煞車。
主動式定速巡航控制的目標,在於跟隨同車道內的前方車輛,並與該車維持駕駛人所設定的時間間隔。若雷達單元未偵測到前方有車,則車輛會維持駕駛人所設定儲存的速度。若前車的速度增加並超出儲存的速度,也會發生這種情形。
重要
駕駛人支援組件的保養僅限於在維修中心進行-建議交由Volvo授權維修中心處理。