注意
PAP 功能會測量空間並控制汽車轉向 - 駕駛人的任務是:
- 密切注意車輛周圍
- 遵循中央顯示器的上的指示
- 選擇檔位(倒退/前進) - 當聽到「乒」的一聲時表示駕駛人應該換檔
- 控制並維持安全車速
- 煞車停止。
執行不同步驟時,會在中央駕駛人螢幕上顯示符號、圖形及/或文字。
引擎起動後,若滿足下列條件,便可啟動 PAP:
- 車輛未附掛拖車
- 速度必須低於時速30公里(20 mph)。
注意
當 PAP 搜尋停車位時,汽車與停車位之間的距離應為 0.5-1.5 公尺(1.6-5.0 英尺)。
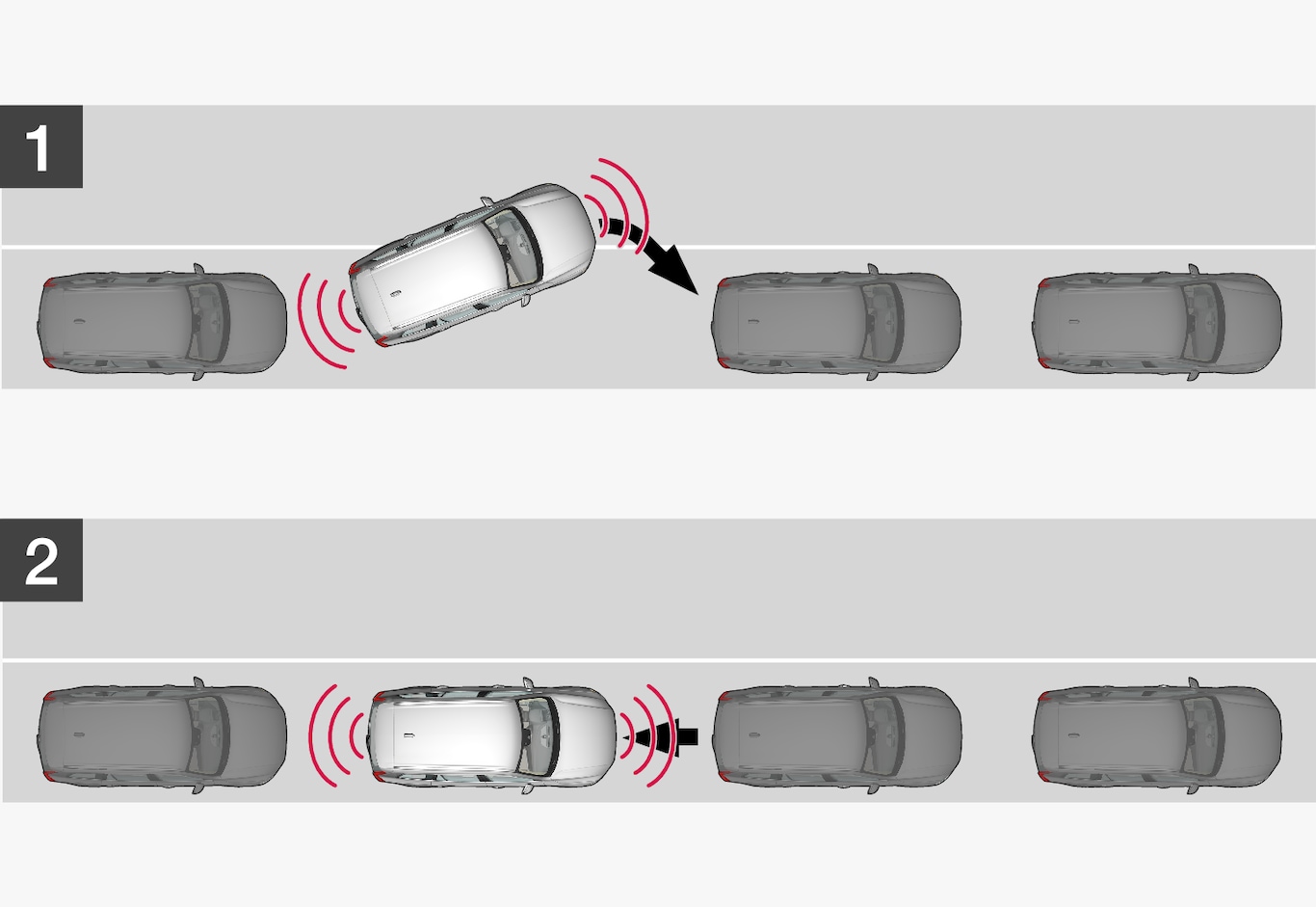
停車
PAP 利用下述步驟停車:
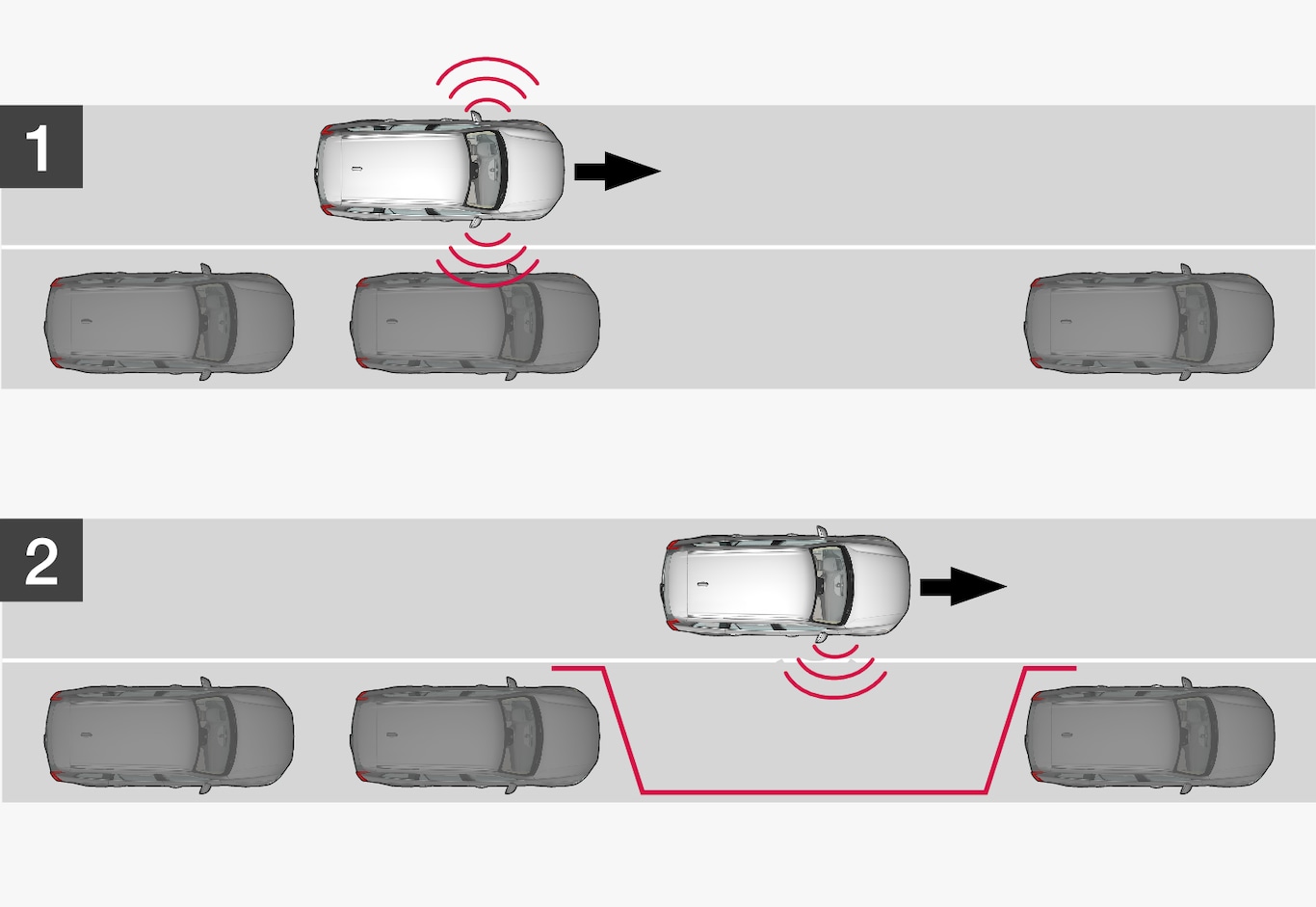
- 找到並測量停車格。
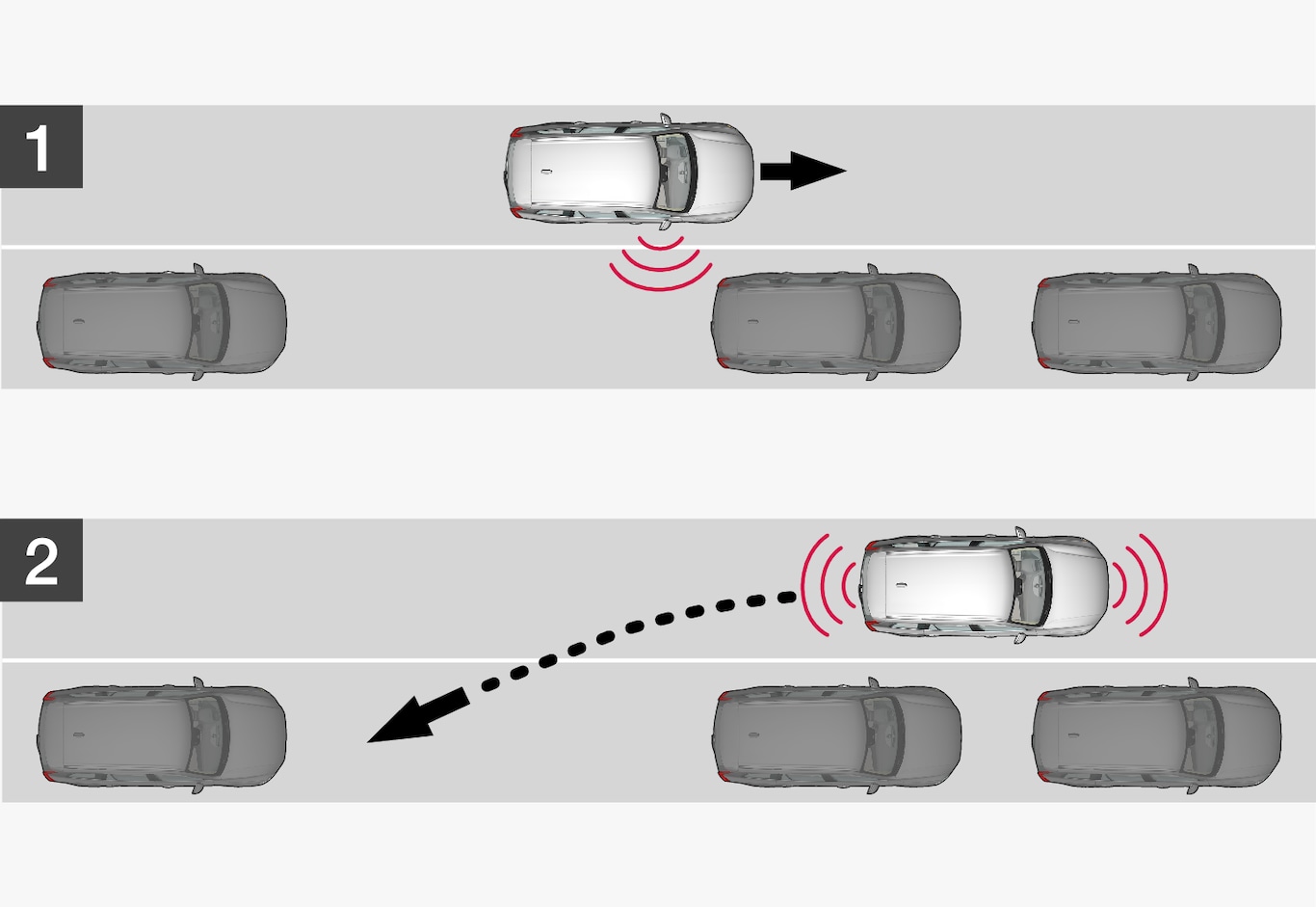
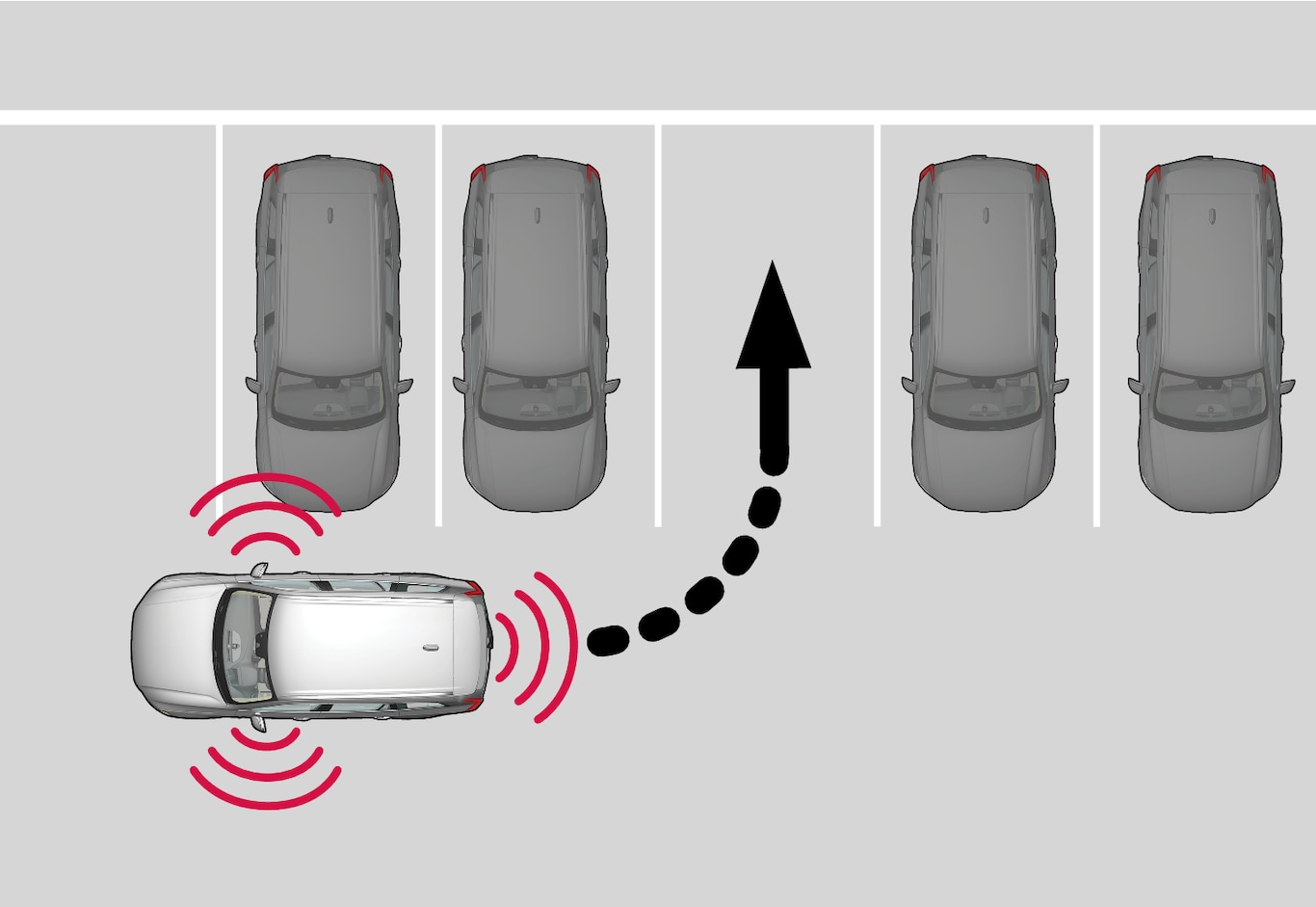
- 車輛會在倒車時轉入停車格。
- 車輛定位於停車格中 - 系統接著可能要求駕駛人換檔。
找到並測量停車格

此功能可在中央顯示器的功能畫面中啟用。
也可從攝影機畫面進入。
操作如下:
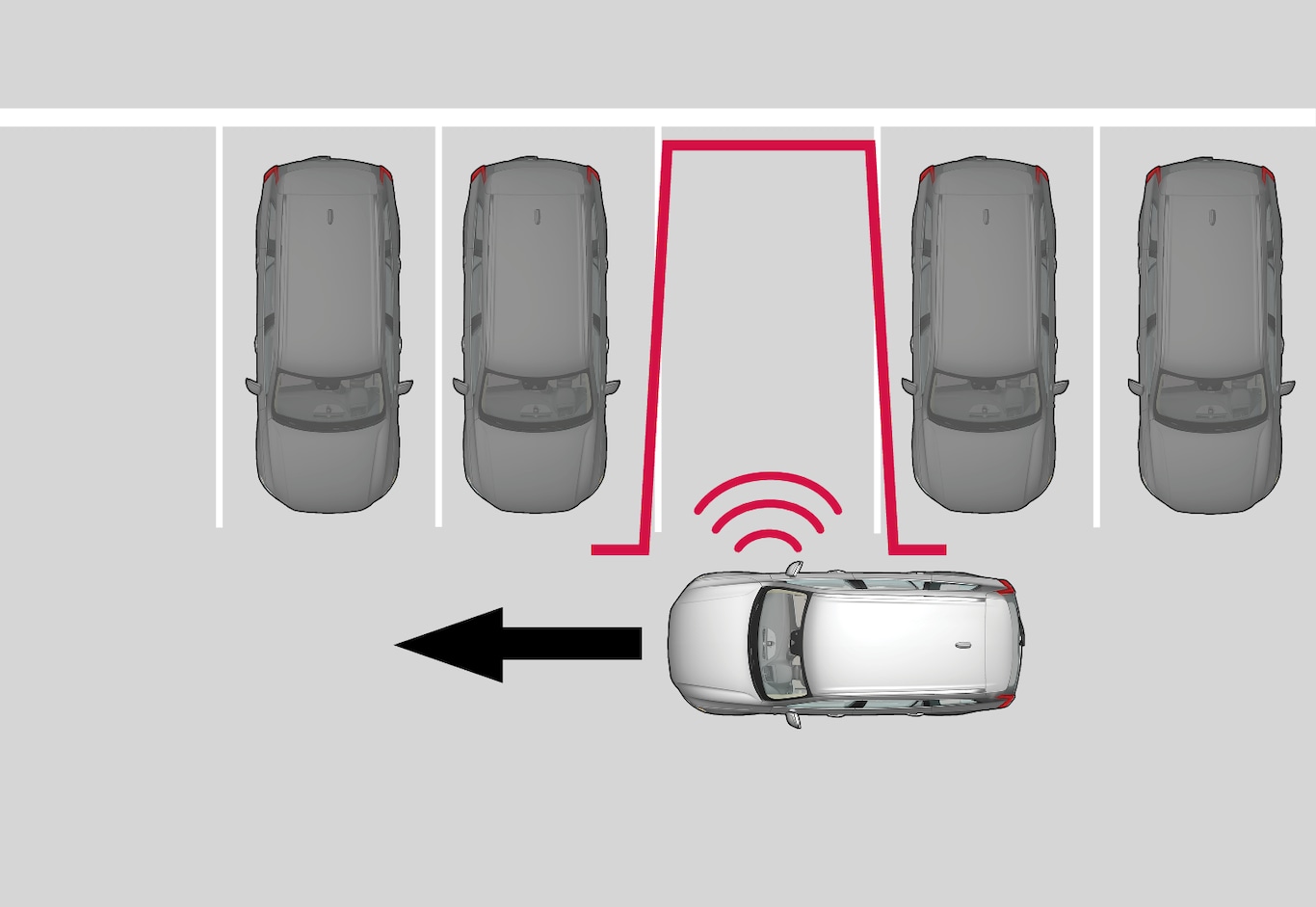
平行停車的時速不超過30公里(20 mph),垂直停車的時速不超過20公里(12 mph)。
點擊功能畫面或是攝影機畫面中的駛入停車位鈕。
PAP會搜尋停車空間並檢查該空間是否夠大。
當中央顯示器上的圖形和訊息顯示找到適合的停車位時,準備好停車。
系統顯示彈出視窗。
選擇平行泊車或倒車入庫並打入倒車檔。
注意
PAP會針對汽車靠乘客那一側的區域搜尋停車空間、顯示指示並引導汽車。但萬一有需要,也可將汽車停放在街道上靠近駕駛人那一側:
- 啟動駕駛側方向燈 - 系統會改為搜尋該側停車位。
倒車進入停車格
倒車進入停車格時請執行以下程序:
檢查確認汽車後方的區域是否淨空,然後打入倒車檔。
在不碰觸方向盤的情況下緩慢、小心地倒車 - 速度不要超過時速 7 公里(4 mph)。
當中央顯示器上的圖形和訊息指示停車時,準備好停車。
注意
- 當 PAP 功能啟動時,請將手遠離方向盤。
- 請確定未以任何方式阻礙到方向盤且方向盤能自由轉動。
- 若要得到最佳結果 - 請先等方向盤轉動過後,再開始向後/向前駕駛。
將車輛定位於停車格中

操作如下:
將檔位選擇器移動至D檔,待方向盤轉動後緩慢向前行駛
當中央顯示器上的圖形和訊息指示停車時,準備好停車。
選擇倒車檔並緩慢向後行駛。
當中央顯示器上的圖形和訊息指示停車時,準備好停車。
本功能會自動關閉,並以圖像及訊息顯示車輛停妥。駕駛人可能需要修正停放位置。只有駕駛人能判斷汽車是否已停妥。
重要
相較於被駐車輔助功能使用時,當感知器被PAP使用時,警示距離會比較短。