駕駛模式
利用駕駛模式可快速進入車輛的多種功能及設定,因應不同駕駛需求。每種駕駛模式都是為了提供最佳行駛特性:
- 轉向
- 引擎/變速箱/全時四輪驅動
- 煞車
- 高度控制*與衝擊吸收
- 整合資訊儀錶組
- 恆溫設定
選擇適合目前駕駛條件的駕駛模式。謹記並非在所有狀況下都可使用所有駕駛模式。
可選擇的駕駛模式
警告
本車在純粹使用電動馬達驅動時並不會發出任何引擎噪音,但在低速和倒車時會刻意製造人為外部噪音。這個警示噪音是為了讓車外用路人,如孩童、行人、單車客及動物,更容易注意到本車並避免不慎遭到輾過的風險。
Hybrid
- 此為車輛的常態模式,電動馬達與內燃引擎會共同作用。
當車輛發動時,會進入Hybrid模式。控制系統會分別或同時使用電動馬達及內燃引擎,並就效能、油耗及舒適度等方面調整使用。車速越快,離地距離會自動縮短1以降低風阻。只使用電動馬達行駛的能力取決於混合動力電池的電量,以及諸如乘客室內的加熱或冷卻需求之類的因素。
若有足夠電力輸出可用,可純粹以電力行駛。踩下油門踏板時,在達到一定位置前,都只有電動馬達會啟用。當超過此位置且電瓶電量不足以提供駕駛人透過油門踏板所要求的引擎功率時,內燃引擎就會起動。
當電量較低時(混合動力電池幾乎沒電),由於必須維持電池內的電量,因此內燃引擎的起動會變得較頻繁。以充電線從 230 VAC 插座對混合動力電池充電,或在功能畫面中啟用充電,以恢復純用電力操作的能力。
此駕駛模式是設計為透過電動馬達和內燃引擎的組合,在不影響恆溫舒適和駕駛體驗的前提下降低能耗。需要更高的加速度時,使用來自電子傳動系統的最大額外功率。
汽車也會感知駕駛條件是否需要全時四輪驅動,如有需要將自動啟用。不論電池的充電狀態如何,全時四輪驅動和額外電能動力隨時都可使用。
整合資訊儀錶組中的資訊
以混合動力模式行駛時,整合資訊儀錶組會顯示混合動力量表。混合動力量表中的指針顯示駕駛人透過油門踏板要求的能量大小。閃電符號與油滴之間的標記顯示可用的能量多寡。
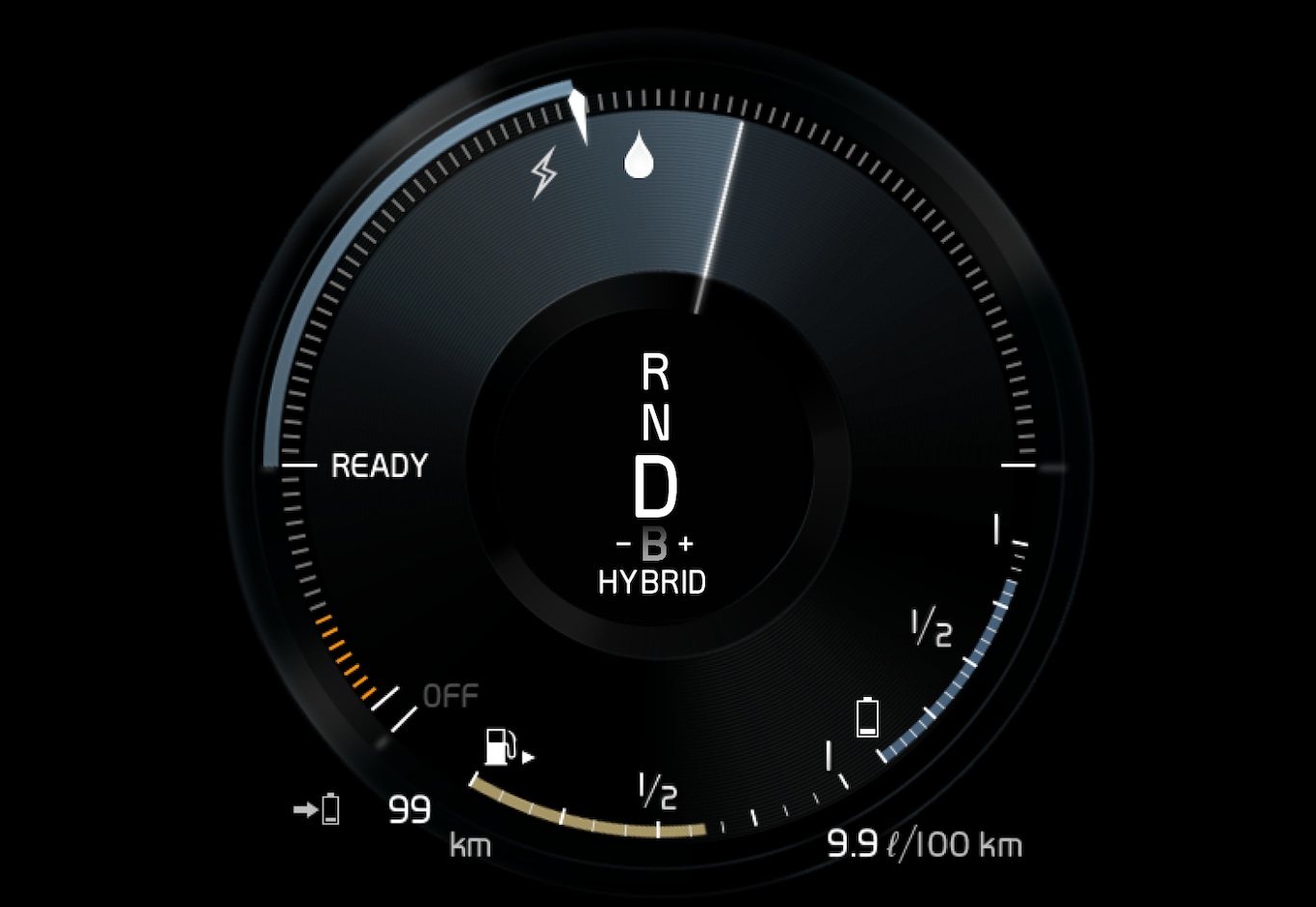
整合資訊儀錶組也會顯示輕煞車過程中能量回送至電瓶(再生)的情形。
Pure
- 以電動馬達駕駛車輛有助於降低能耗及二氧化碳排放。
此駕駛模式會優先以混合動力電池的行駛。例如,這表示離地間隙縮小1以降低風阻,且特定恆溫設定的輸出減少,以盡量延長能夠單獨以電力行駛的距離。
混合動力電池具有足夠高的電量狀態(SoC)及可用的功率輸出時(這些可能會受到溫度影響),可使用Pure模式。內燃引擎起動時,駕駛模式會自動改變為Hybrid模式,直到駕駛人有機會再度選擇Pure模式為止。
- 電池的電量狀態(SoC)過低
- 駕駛人將油門踏板踩到底。
- 電池的電量狀態(SoC)過低
- 如果時速超過140公里 (87 mph)(下坡行駛等情況不適用)
- 若系統/組件受到限制,如車外溫度過低時。
注意
此駕駛模式是專為市區交通研發,以達成最大電動行駛距離為目的。Pure意指即使混合動力電池沒電時的最低燃燒。乘客室內的溫度調節到Eco溫度,在濕滑的駕駛條件下,自動啟動全時四輪驅動之前,可以允許更多的車輪打滑。
ECO恆溫控制
在Pure駕駛模式中,乘客室的Eco恆溫控制會自動啟動以減少能量消耗。
注意
若因起霧視線不清,請按下具有正常功能的最大除霜器按鈕。
Off Road
- 在崎嶇地形及惡劣路況駕駛時優先考量提昇車輛的牽引力。
此駕駛模式提供較大的離地距離1,轉向輕盈,且全時四輪驅動和附加陡坡緩降控制系統(Hill Descent Control)的低速控制功能啟動。
此駕駛模式僅適用於40 km/h (25 mph)以內的低速。若超過此速度,系統會取消Off Road模式,並改為啟動Constant AWD駕駛模式。
採用全四輪駕駛時,內燃引擎及電動馬達會持續運轉,因此油耗會增加。
在Off Road模式中,整合資訊儀錶組會在速度計和轉速表之間顯示指南針。速度計會顯示速度限制範圍。
此駕駛模式旨在於在惡劣路況或崎嶇地形低速駕駛時獲得最大可控性。此模式可抬高底盤1、降低傳動系統的油門反應,並將汽車鎖定在全時四輪驅動。Hill Descent Control功能有助於在陡降坡上控制駕駛。
注意
注意
重要
Constant AWD
- 以強化全四輪駕駛改善車輛的抓地力及牽引力。
此駕駛模式將汽車鎖定在全時四輪驅動。透過調整前後軸扭力之間的分配達成良好牽引力、穩定性和抓地力,例如在濕滑路面上、加掛重型拖車行駛時,或是拖吊時。不論電池的充電狀態如何,Constant AWD駕駛模式隨時都可使用。
以全部四輪行駛時,會動用到內燃引擎及電動馬達,因此油耗會增加。
在車輛的其他駕駛模式中,車輛會自動因應路面調適四輪驅動的需求,並且會視需要使用電動馬達或發動內燃引擎。
Power
- 車輛具有更強烈的跑車性格,且對加速的反應更快。
此駕駛模式同時採用前、後輪區動車輛,因此能夠適當調整內燃引擎與電動馬達的結合力量。換檔更快且感覺更明顯,變速箱會優先使用牽引力較大的檔位。轉向反應更快,衝擊吸收較硬,且離地較近1,表示車身更貼地,在轉彎時可減少晃動。
以全部四輪行駛時,會動用到內燃引擎及電動馬達,因此油耗會增加。
此駕駛模式旨在達成最大性能以及對加速的反應力。它會變更內燃引擎的油門踏板回應、換檔模式及增壓系統。底盤設定、轉向和煞車反應也盡量發揮最佳性能。不論電池的充電狀態如何,Power駕駛模式隨時都可使用。
Polestar Engineered版本*也可使用Power模式。
Individual
- 依據個人偏好調整駕駛模式。
選擇開始的駕駛模式,然後依據所需駕駛特性調整設定。這些設定會儲存在個別駕駛人檔案中。
個人駕駛模式只有首次在整合觸控螢幕中控台上啟動時才能夠使用。
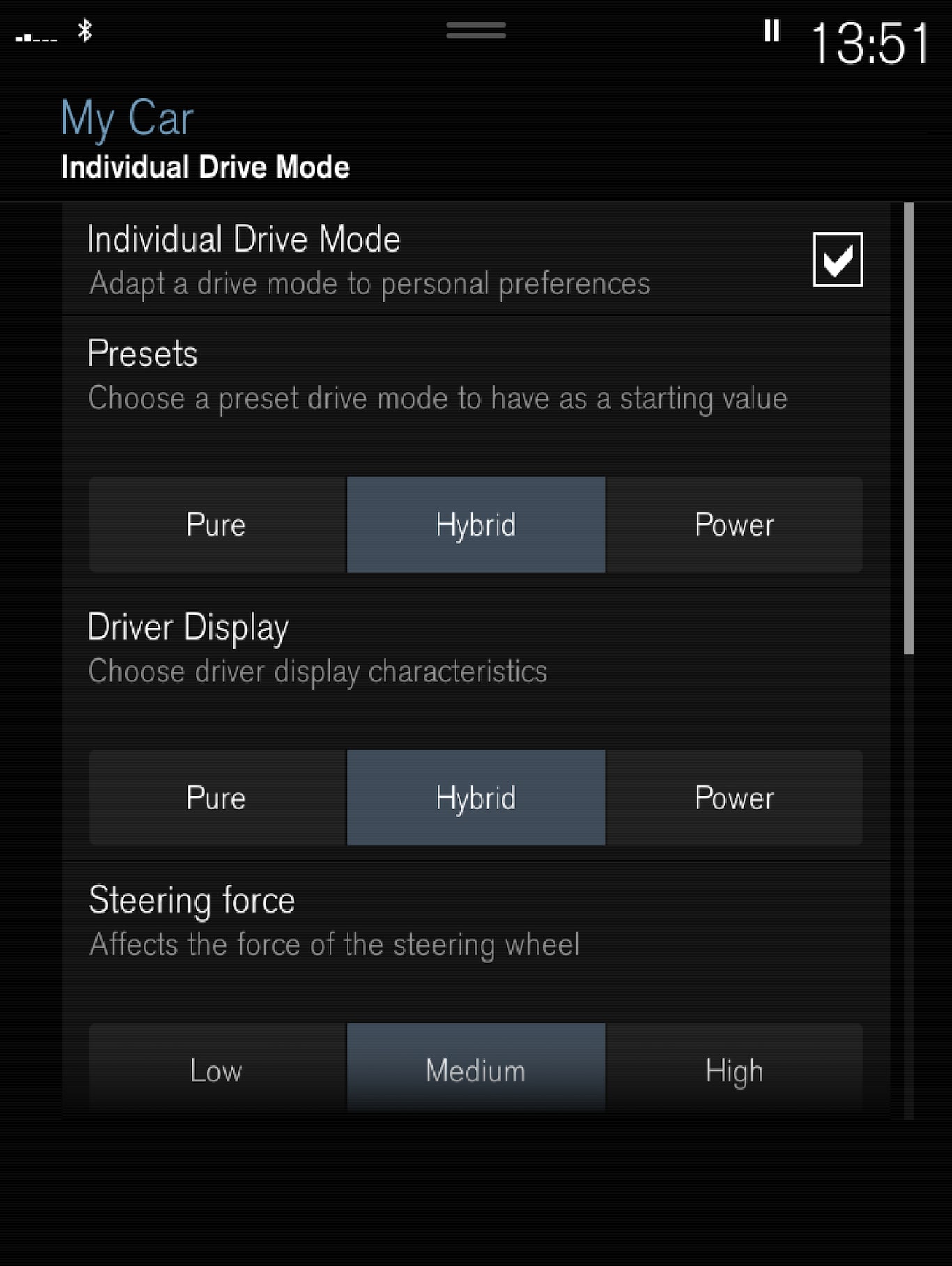
在預設中,選擇發動時使用的駕駛模式:Pure、Hybrid、Power或Polestar Engineered*。
可能的調整適用於以下設定:
- 駕駛者儀表板
- 方向盤輔助力道
- 動力系統特點
- 煞車特性
- 懸吊控制
- ECO溫度
使用電動馬達或內燃引擎
先進控制系統會決定車輛以內燃引擎、電動馬達或兩者並用行駛的程度。
主要功能是考量不同駕駛模式的特性以及駕駛人透過油門踏板表現的動力要求,盡可能有效運用引擎或馬達及混合動力電池中的可用電量。
有些情況下,因法規要求維持車輛的低總排放量而使系統或功能的受到暫時限制,可能會較大程度使用內燃引擎。