您的汽車瞭解周圍環境的能力,是透過許多系統和感知器類型達成的。 汽車解讀其收集的資料,可協助決定汽車的行為,特別是駕駛人支援功能。
| 攝影機 | 攝影機的運作方式和人眼類似。 它們捕捉的內容會用於不同目的,隨攝影機而異。 例如,上方前向式攝影機協助汽車辨識交通號誌和道路標記等事項,而後方停車攝影機捕捉的畫面會出現在整合觸控螢幕中控台中。 |
| 雷達 | 雷達使用無線電波收集有關汽車周圍的資訊, 可以辨識物體的距離,和物體移動的特定層面。 這項資訊對於汽車的許多功能都很重要。 |
| 停車感應器 | 這些感應器使用聲波偵測相對接近的物體。 作用原理是透過發射超音波脈衝,並在遇到物體時回彈到感應器上。 |
系統如何協同運作
不同的偵測類型會彼此互補。 有時候會單獨使用,有時候會合併使用。
重要
即使合併使用時,這些偵測系統也無法處理所有狀況和交通情況。 因此駕駛人絕對不能完全仰賴駕駛人支援功能,非常重要。 一律要注意駕駛人支援功能性能會受到功能限制影響的狀況和情況。
一般偵測與識別限制
每種類型的偵測都有自己的限制,不過也需要考量一些通用事項。
- 汽車無法完全處理無法預測或怪異的情況。 汽車發現自己難以正確辨識環境或交通情況時,會影響其回應的準確度。
- 汽車損壞可能會影響偵測和使用偵測的功能。 汽車可以識別許多故障,但有些可能無法自行識別。 因此確保汽車處於良好狀況且正確運作非常重要。 如果您懷疑發生任何故障或注意到汽車損壞,請聯絡 Volvo 授權維修中心。
- 限制因素和狀況可能且經常同時發生。 它們可能會複合並發生互動,加強汽車產生的不正確反應。
障礙物偵測限制
障礙物偵測可協助汽車識別特定靜止和移動物體。 它們可能是其他用路人,例如行人或其他車輛、動物、柵欄或其他物體。 這些物體如果在汽車的行駛路徑內或附近,有可能會帶來碰撞風險。 取決於情況,如果正確識別物體,汽車可能可以警告或介入。 對於汽車可識別的所有其他類型物體,有許多因素會防止準確識別。 限制因素、情況與事件的範例包括:
- 間隔相近、重疊或部分遮擋的物體和用路人。
- 融入背景中的物體和用路人。
- 特別快速移動或加速的物體和用路人。
- 少見的車輛,例如仰臥式自行車、聯合收割機或負載形狀奇特的拖車。
- 相較於一般成人自行車,不同類型或大小的自行車。
- 新的交通運輸模式。
- 改變行人輪廓的衣物或攜帶物品。
- 身高 80 cm (32 吋) 以下的行人。
- 障礙物傾斜以至於產生不明剪影。
- 動物的大小和速度。 貓狗通常太小而無法可靠識別。
注意
交通偵測範例
不同交通情境的範例,可協助您瞭解您汽車偵測系統的某些限制。 真實情境通常比本手冊中展示1的範例更複雜。
視野以外和延遲偵測
您汽車周圍的多個偵測區是靜態的,每個都具有有限的範圍和視野。 如果有東西以異常角度、高速下或非常貼近您的汽車情況下進入偵測區,有可能會造成迅速反應。 相較於可以提前偵測的情況,這會縮短安全應變時間。
重要
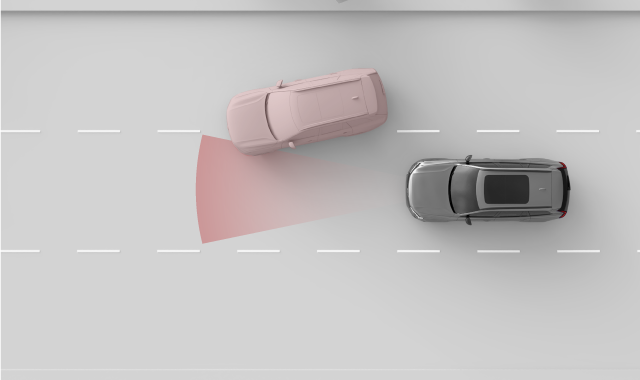
車道位置與小型車
對於前方偵測,車道中間相較於外側部分,是較佳的位置。 如果車輛沒有佔據車道中間,有可能偵測不到。 雖然任何車輛都可能發生,不過機車等小型車發生的風險較高。 它們佔用的車道寬度較窄,並且在車道內的挪移空間較大。 務必特別注意沒有在車道中間駕駛的任何車輛。
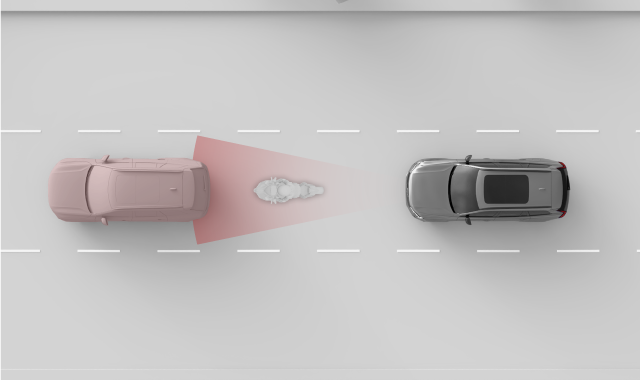
物體的形狀、大小和數量
取決於偵測區內物體的形狀、大小和數量,偵測可能會比較不可靠。 取決於上述因素,特別是多項複合因素,識別和前方最接近車輛的距離,可能比較不精確。
- 小物體可能較難識別。
- 移動的物體,辨識個別物體的難度更高。
- 彼此接近而重疊的物體較難辨識。
- 具有懸吊或突出的部分等不均勻形狀的物體,較難識別。
前方出現大型車輛,可能會導致難以辨識機車等較小型車輛。
重要
前方拖車
由於形狀和高度,相較於道路上的其他許多車輛,拖車的偵測通常比較不可靠。 這特別適用於窄拖車、低拖車和具有非常高載貨台的拖車。 這些類型的拖車通常在高度方面沒有足夠的表面積,而這是前方偵測系統注重的方面。
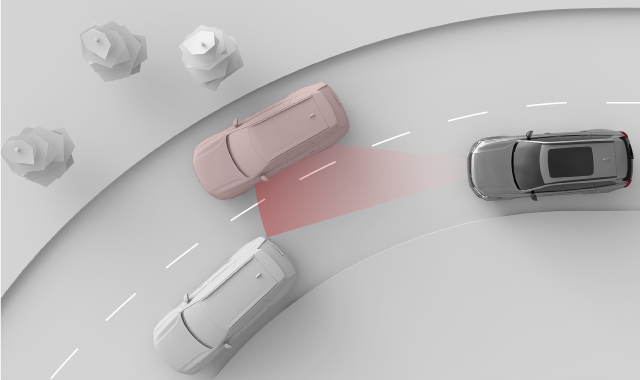
道路與基礎建設
道路中的彎道可能會導致汽車錯誤解讀交通情況。 例如可能會失去車輛蹤跡,或者錯誤識別前方車輛所在的車道。
重要
道路狀況與不規則性
常見和少見的道路特徵,都可能影響汽車偵測系統有效性。
- 道路上的急轉彎和隆凸,可能會暫時遮擋汽車周圍環境的重要部分,例如其他車輛或道路標記。
- 汽車可能無法正確識別非標準或異常的道路基礎建設。 例如,道路施工或交通分流可能會導致衝突或多組道路標記。
- 可能無法正確識別磨損的道路標記或標誌。