Park assist lines and fields for the park assist camera*
Park assist lines

Park assist lines show the intended route for the car's external dimensions with the current steering wheel angle - this facilitates parallel parking, reversing into tight spaces and when connecting a trailer.
The lines on the screen are projected as if they were at ground level behind the car and respond directly to steering wheel movements, showing the driver the path the car will take - also when the car is turning.
These park assist lines include the car's most protruding parts, e.g. towbar, door mirrors and corners.
Note
- When reversing with a trailer which is not connected electrically to the car, the lines on the display show the route the car will take - not the trailer.
- The screen shows no lines when a trailer is connected electrically to the car's electrical system.
Important
Remember that when rear camera view is selected, the centre display only shows the area behind the car. Keep an eye on the sides and front of the car when turning the steering wheel while reversing.
The same applies vice versa - note what happens to the rear parts of the car when the front camera view is selected.
Note that the guide lines show the shortest route. Therefore, pay extra attention to the car's sides so that they do not go against/over something when the steering wheel is turned when driving forward or that the front sweeps against/over something when the steering wheel is turned when reversing.
Park assist lines in 360° view*
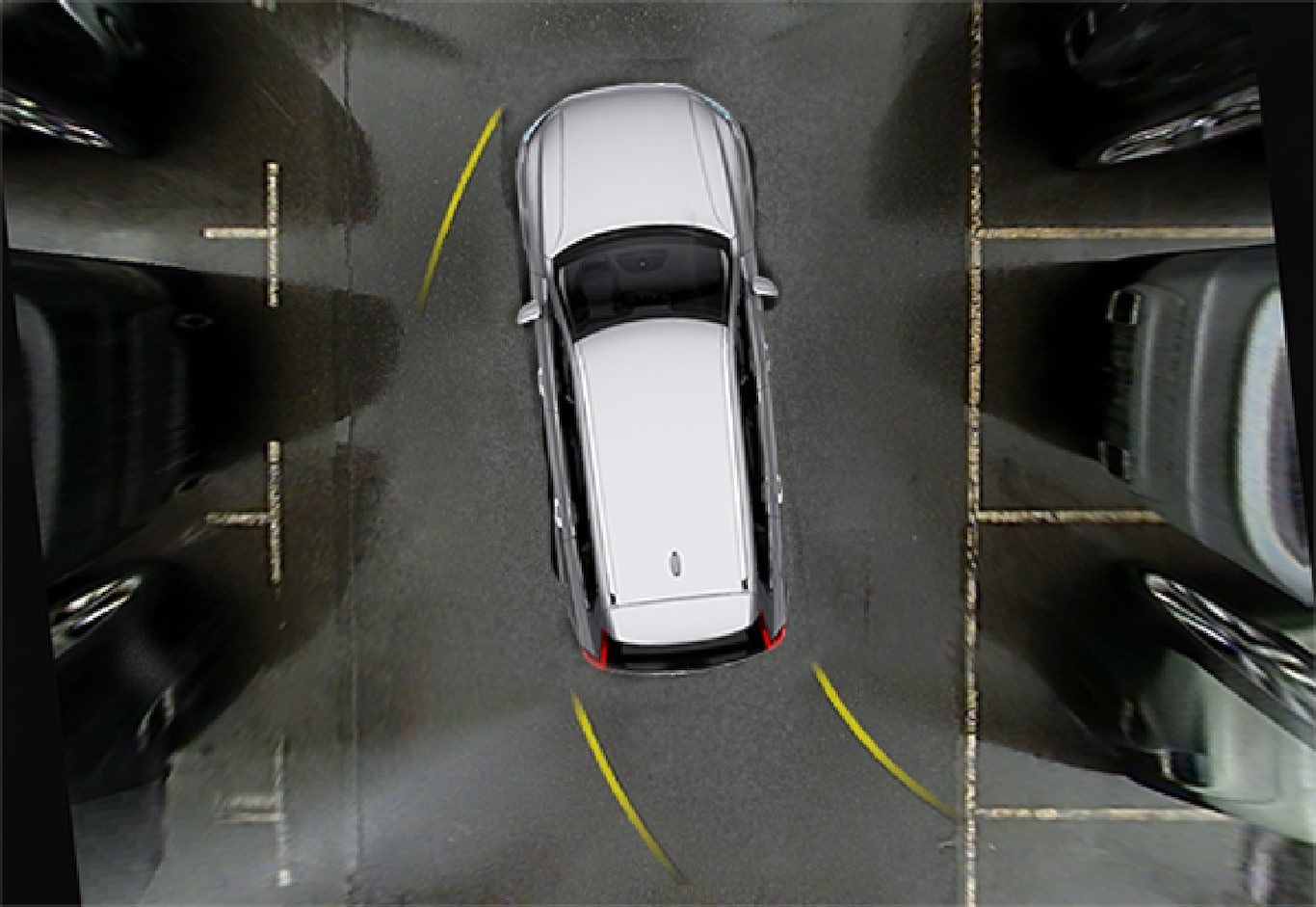
- When driving forwards: Front lines
- When reversing: Side lines and reversing lines.
If front camera, reversing camera or side camera has been selected, park assist lines are displayed without regard to the car’s direction of travel.
Towbar assist line
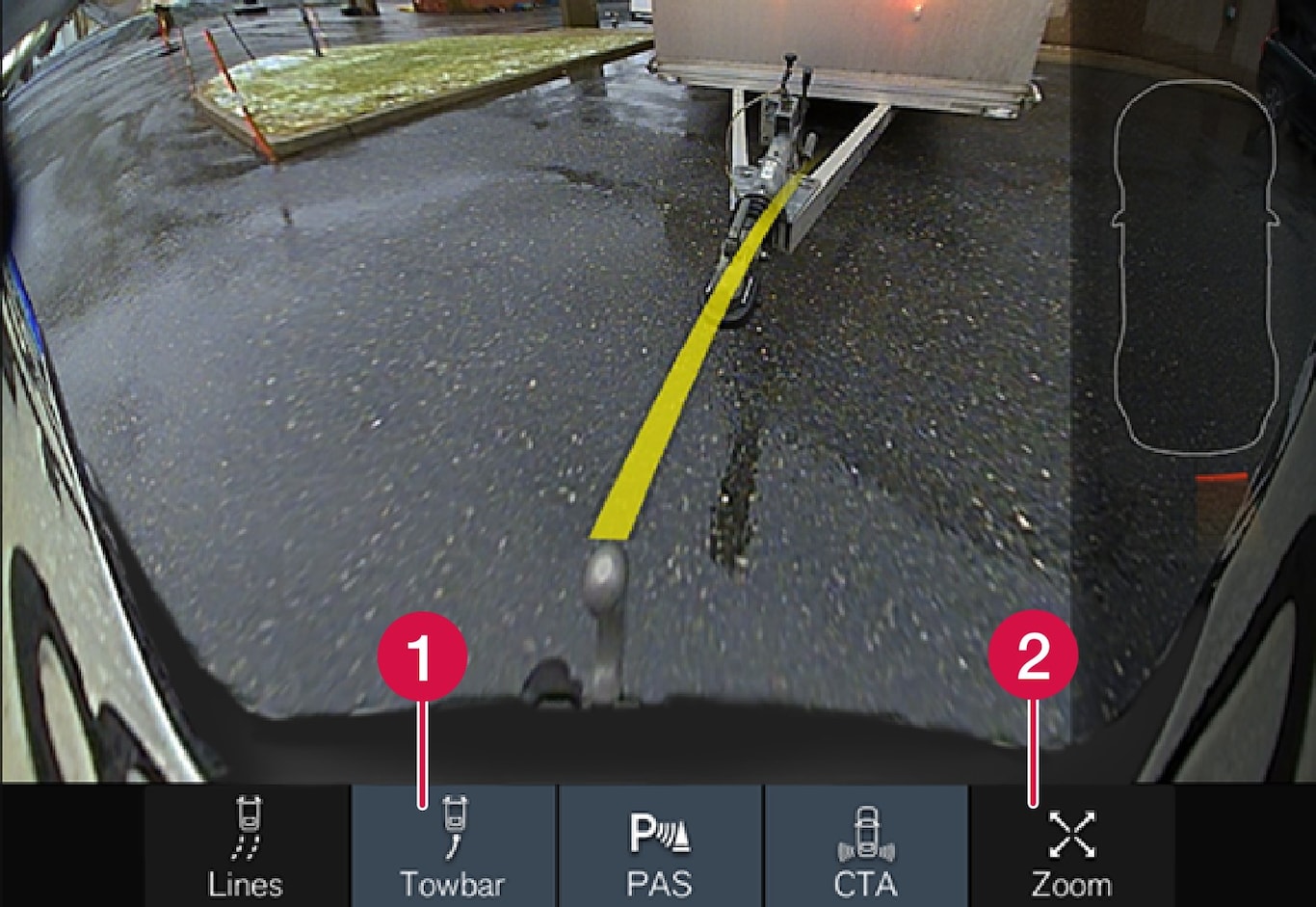
 - activates the towbar assist line*.
- activates the towbar assist line*. - zoom in/out.
- zoom in/out.
The camera can facilitate connecting up to a trailer by showing an assist line representing the towbar's intended "path" to the trailer.
Assist lines for both the car and the towbar cannot be shown at the same time.
Sensor field from Parking assistance*
If the car is equipped with Parking assistance* then the distance is shown in the 360° view with coloured fields for each sensor that registers an obstacle.
Sensor fields backwards and forwards

The fields for the front and reversing sensors change colour as the distance to the obstacle decreases — from yellow through orange to red.
| Colours of front and reversing fields | Distance (metres) |
|---|---|
| Yellow | 0,6–1,5 |
| Orange | 0,4–0,6 |
| Red | 0–0,4 |
Sensor field to the sides
The side fields are only shown in orange.
| Colour of side fields | Distance (metres) |
|---|---|
| Orange | 0–0.3 |