Способность автомобиля распознавать окружающую обстановку обеспечивается многими системами и датчиками и многих типов. Интерпретация автомобилем собираемых им данных позволяет получить информацию о его действиях, особенно при работе функций поддержки водителя.
| Камеры | Камеры работают подобно человеческому глазу. Изображения с разных камер используются для разных целей. Например, верхняя камера переднего вида помогает автомобилю распознавать такие объекты, как дорожные знаки и дорожную разметку, а изображения с парковочной камеры заднего вида отображаются на дисплее. |
| Радары | Для сбора информации об обстановке вокруг автомобиля радары используют радиоволны. Они могут определять расстояние до объектов и определенные параметры их перемещения. Эта информация необходима многим функциям в автомобиле. |
| Ультразвуковые парковочные датчики | Для обнаружения относительно близких объектов эти датчики используют звуковые волны. Они посылают ультразвуковые импульсы, которые при контакте с объектом могут отражаться назад к датчикам. |
Совместная работа систем
Системы обнаружения различных типов дополняют друг друга. Иногда они используются по отдельности, а иногда и вместе.
Важно!
Общие ограничения при обнаружении и идентификации
- Автомобиль не всегда может справиться с непредвиденными или необычными ситуациями. Иногда автомобилю трудно правильно определить окружающую обстановку или дорожную ситуацию, что сказывается на точности его реакции.
- Повреждение автомобиля может повлиять на функции обнаружения и надежности. Автомобиль способен выявить многие неисправности, но есть и такие, которые невозможно выявить самостоятельно. Именно поэтому важно следить за тем, чтобы автомобиль был исправен и в хорошем состоянии. В случае подозрения на неисправность или признаков повреждения автомобиля обратитесь на официальную станцию техобслуживания Volvo.
- Ограничивающие факторы и условия могут и часто совпадают. Они могут объединяться и взаимодействовать таким образом, что это приводит к неправильной реакции автомобиля.
Ограничения обнаружения препятствий
Обнаружение препятствий помогает автомобилю идентифицировать определенные неподвижные и движущиеся объекты. Этими объектами могут быть другие участники дорожного движения, например, пешеходы или другие транспортные средства, животные, барьеры или другие объекты. Если они находятся на пути движения автомобиля или рядом с ним, они могут представлять опасность столкновения. В зависимости от обстоятельств автомобиль может предупредить или вмешаться, если объект точно идентифицирован. Для всех типов объектов, которые может идентифицировать автомобиль, существует множество факторов, которые могут помешать точной идентификации. Примеры ограничивающих факторов, ситуаций и событий включают в себя:
- Близко расположенные, перекрывающие друг друга или частично заблокированные объекты и участники дорожного движения.
- Объекты и участники дорожного движения, сливающиеся с фоном.
- Объекты и участники дорожного движения, которые движутся или ускоряются особенно быстро.
- Нестандартные транспортные средства, такие как велосипеды, комбайны или прицепы с грузами необычной формы.
- Велосипеды другого типа или размера по сравнению с обычными велосипедами для взрослых.
- Новые виды транспорта.
- Одежда или переносимые предметы, изменяющие силуэт пешехода.
- Пешеходы ростом ниже 80 см (32 дюйма).
- Препятствия расположены под углом, что создает неизвестный силуэт.
- Размер и скорость животных. Кошки и собаки часто слишком малы, чтобы их можно было надежно идентифицировать.
Примечание
Примеры определения дорожной обстановки
Приведенные ниже примеры различных сценариев дорожной обстановки помогут вам понять некоторые ограничения систем обнаружения вашего автомобиля. Реальные сценарии часто оказываются более сложными, чем иллюстративные1примеры, приведенные в данном руководстве.
Объекты вне поля зрения и позднее обнаружение
Различные зоны обнаружения вокруг вашего автомобиля статичны, каждая из них имеет ограниченный радиус действия и поле зрения. Если что-то попадает в зону обнаружения под необычным углом, на высокой скорости или очень близко к вашему автомобилю, это может вызвать быструю реакцию. Это снижает запас безопасности по сравнению с ситуацией, в которой было возможно более раннее обнаружение.
Важно!
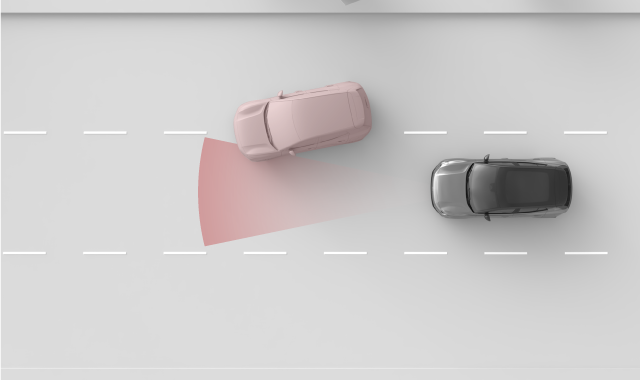
Размещение полос движения и малые транспортные средства
Для обнаружения впереди движущихся объектов середина полосы движения более благоприятна по сравнению с ее внешними частями. Транспортные средства могут остаться незамеченными, если они не занимают середину полосы движения. Хотя это может произойти с любым транспортным средством, риск выше для небольших транспортных средств, таких как мотоциклы. Они занимают меньшую ширину полосы движения и могут больше перемещаться по ней. Всегда обращайте повышенное внимание на транспортные средства, движущиеся не по центру полосы.
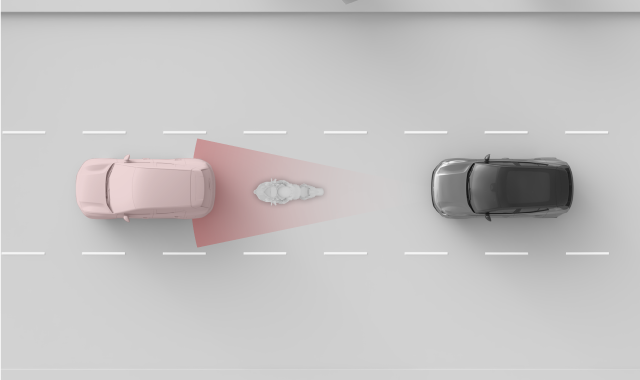
Форма, размер и количество объектов
- Мелкие объекты сложнее идентифицировать.
- Чем больше объектов, тем сложнее идентифицировать отдельные из них.
- Объекты, расположенные близко друг к другу и перекрывающие друг друга, труднее идентифицировать.
- Объекты неоднородной формы, например, имеющие выступы или выступающие части, труднее идентифицировать.
Наличие большого транспортного средства впереди может затруднить распознавание радаром транспортного средства меньшего размера, например, мотоцикла.
Важно!
Прицеп впереди
По сравнению со многими другими транспортными средствами на дороге обнаружение прицепов зачастую менее надежно из-за их формы и высоты. Это относится, в частности, к тонким прицепам, низким прицепам и прицепам с очень высокой погрузочной площадкой. Прицепы такого типа часто не имеют достаточной площади на высоте, на которой сосредоточены системы переднего обнаружения.
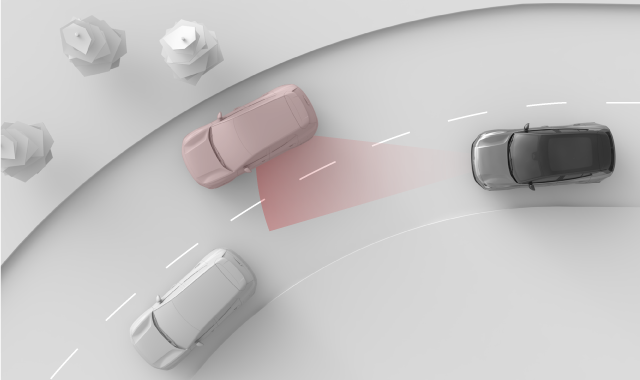
Дорога и инфраструктура
Из-за изгибов дороги автомобиль может воспринимать дорожную ситуацию неправильно. Например, он может потерять из виду транспортное средство или неправильно определить полосу движения транспортного средства впереди.
Важно!
Состояние дорог и неровности рельефа
- Резкие повороты и неровности дороги могут временно закрывать важные части окружения автомобиля, например, другие транспортные средства или дорожную разметку.
- Нестандартная или необычная дорожная инфраструктура может неправильно распознаваться автомобилем. Например, дорожные работы или изменение направления движения могут привести к появлению нескольких противоречивых схем дорожной разметки.
- Изношенная дорожная разметка или знаки могут быть неправильно идентифицированы.