Okolní situaci vozidlo vyhodnocuje prostřednictvím mnoha systémů a senzorů různého druhu. Vozidlo získávaná data průběžně vyhodnocuje a upravuje své chování, zejména fungování systémů na podporu řízení
| Kamery | Kamery fungují podobně jako lidské oko. Informace získávané kamerami se využívají k různým účelům, které závisejí na konkrétní kameře. Například nahoře umístěná přední kamera pomáhá rozpoznávat dopravní značky a značení na vozovce. Obraz snímaný zadní parkovací kamerou se zase zobrazuje na displeji. |
| Radary | Radary získávají informace o okolí vozidla prostřednictvím rádiových vln. Dokáží určovat vzdálenost od překážek i některé vlastnosti prostředí. Tyto informace jsou nezbytné pro mnoho různých funkcí vozidla. |
| Ultrazvukové parkovací senzory | Tyto senzory používají k rozpoznávání blízkých předmětů zvukové vlny. Fungují tak, že vysílají ultrazvukové impulzy, které se od případné překážky odrazí zpět k senzorům. |
Jak systémy spolupracují
Různé funkce rozpoznávání se vzájemně doplňují. Některý se používají samostatně a jindy zase v součinnosti.
Důležité
Obecná omezení rozpoznávání a identifikace
- Vozidlo nedokáže pokaždé správně reagovat na všechny nepředvídatelné nebo zvláštní situace. Nedokáže-li vozidlo správně určit podmínky prostředí nebo dopravní situaci, má to dopad na přesnost jeho odezvy.
- Poškození vozidla může mít vliv na rozpoznávání a závislé funkce. Mnohé závady dokáže vozidlo identifikovat vlastními silami, ale ne nutně všechny. Je proto důležité udržovat vozidlo v dobrém a plně provozuschopném stavu. Máte-li podezření na poruchu nebo zaznamenáte nějaké poškození vozidla, obraťte se na autorizovaný servis Volvo.
- Omezující faktory a stavy mohou vzájemně kolidovat a opravdu často kolidují. Mohou se spojovat a vzájemně reagovat tak, že způsobí nesprávnou reakci vozidla.
Omezení rozpoznávání překážek
Díky rozpoznávání překážek může vozidlo identifikovat některé stojící a pohybující se objekty. Mohou to být jiní účastníci silničního provozu, jako jsou například chodci nebo jiná vozidla, zvířata, zábrany nebo jiné předměty. Pokud se vyskytují v cestě vozidla nebo v její blízkosti, mohly by představovat riziko srážky. V závislosti na okolnostech bude vozidlo schopno na objekt upozornit nebo zasáhnout, pokud ho přesně identifikuje. U všech druhů objektů, které vozidlo může identifikovat, existuje celá řada faktorů, které mohou přesné identifikaci zabránit. Jako příklad omezujících faktorů, situací a událostí můžeme uvést:
- blízko sebe umístěné, překrývající se nebo částečně zablokované objekty a účastníci silničního provozu,
- objekty a účastníci silničního provozu, kteří splývají s okolím,
- objekty a účastníci silničního provozu, kteří se pohybují nebo zrychlují obzvláště rychle,
- neobvyklá vozidla, jako jsou například lehokola, kombajny nebo přívěsy s nákladem zvláštního tvaru,
- jízdní kola jiného typu nebo velikosti oproti běžnému jízdnímu kolu pro dospělé,
- nové jízdní prostředky,
- oděv nebo předmět, který chodec nese a který mění jeho siluetu,
- chodci menší než 80 cm (32 palců),
- překážky zakřivené tak, že vytvářejí neznámou siluetu,
- velikost a rychlost zvířat. Kočky a psi nelze často kvůli jejich malé velikosti spolehlivě identifikovat.
Poznámka
Příklady rozpoznávání dopravních situací
Níže uvádíme příklady různých dopravních situací, které ilustrují možná omezení detekčních systémů vozidla. Scénáře z reálného života jsou často složitější než následující ilustrativní příklady1 v této příručce.
Mimo zorné pole a pozdní rozpoznání
Různé zóny rozpoznávání kolem vozidla jsou statické a každá má omezený rozsah a zorný úhel. Pokud něco vstoupí do zóny rozpoznávání pod neobvyklým úhlem, vysokou rychlostí nebo velmi blízko vozidla, může to vyvolat rychlou reakci. Snižuje to bezpečností rezervy oproti situaci, v níž by bylo možné dřívější rozpoznání.
Důležité
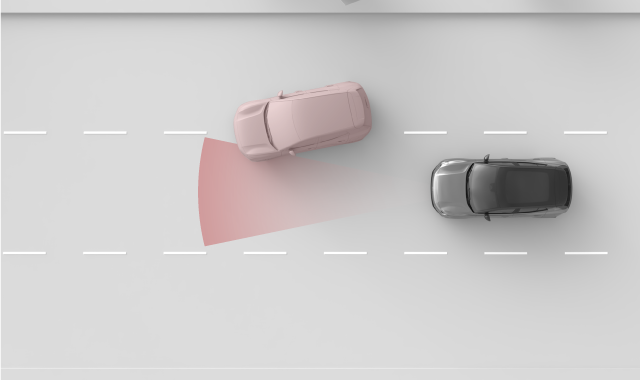
Poloha v jízdním pruhu a malá vozidla
Pro rozpoznávání objektů před vozidlem je střed jízdního pruhu výhodnější než jeho okraje. Pokud vozidla nejedou uprostřed pruhu, nemusí být rozpoznána. Ačkoli se to může stát kterémukoli vozidlu, riziko je vyšší u těch malých, například u motocyklů. Zabírají menší prostor z šířky pruhu a mohou se v něm více pohybovat. Vždy věnujte vozidlu, které nejede uprostřed pruhu, zvláštní pozornost.
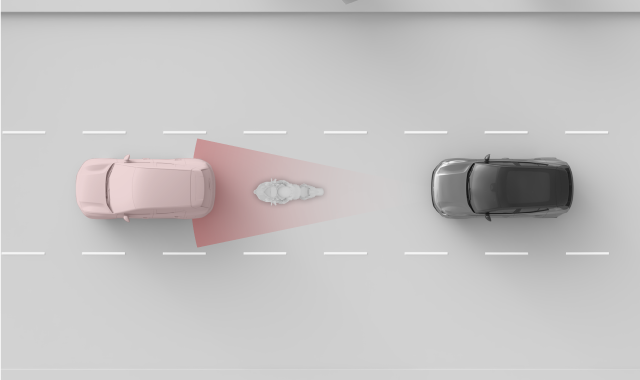
Tvar, velikost a počet objektů
- Malé objekty se identifikují hůře.
- Čím více je objektů, tím hůře se rozeznávají jednotlivě.
- Objekty blízko sebe, které se překrývají, se rozpoznávají hůře.
- Objekty s nejednotným tvarem, například s převisy nebo vyčnívajícími částmi, se rozpoznávají hůře.
Přítomnost velkého vozidla před vámi může zkomplikovat rozpoznání jiného menšího prostředku, jako například motocyklu.
Důležité
Přívěs vpředu
Oproti mnoha jiným vozidlům na silnici je rozpoznání přívěsů kvůli jejich tvaru a výšce často méně spolehlivé. To se týká zejména úzkých a nízkých přívěsů a přívěsů s velmi vysokou ložnou plochou. Tyto typy přívěsů často nemají dostatečnou plochu ve výšce, na kterou se zaměřují přední systémy rozpoznávání.
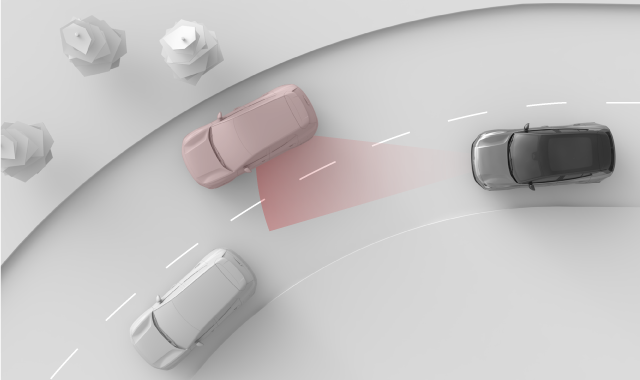
Vozovka a infrastruktura
Dopravní situaci může radar nesprávně určit kvůli zatáčkám. Například může ztratit sledované vozidlo nebo špatně určit pruh, ve kterém vozidlo vpředu jede.
Důležité
Stav a nepravidelnosti vozovky
- Ostré zatáčky a hrboly na silnici mohou dočasně zakrýt důležité části okolí vozidla, například jiná vozidla nebo dopravní značení.
- Vozidlo nemusí správně identifikovat nestandardní nebo neobvyklou silniční infrastrukturu. Například v úsecích, kde právě probíhají práce na silnici nebo je odkláněna doprava, mohou být jízdní pruhy vyznačeny rozporuplně nebo nejednoznačně.
- Nemusí být správně identifikovány dopravní značení ve špatném stavu.