Viele verschiedene Sensoren und Systeme beliefern das Fahrzeug mit Informationen zu seiner Umgebung. Aufgrund dieser Informationen passt das Fahrzeug sein Verhalten an – insbesondere im Hinblick auf die Fahrerassistenzfunktionen.
| Kameras | Die Kameras funktionieren im Grunde genommen wie das menschliche Auge. Die von ihnen erfassten Informationen dienen als Grundlage für verschiedene Funktionen, die die Kameras nutzen. Mit der oberen Frontkamera erkennt das Fahrzeug z. B. Verkehrsschilder und Straßenmarkierungen, mit der hinteren Parkkamera wird das Umfeld hinter dem Fahrzeug auf dem Center Display dargestellt. |
| Radarmodule | Radarmodule erfassen das Umfeld des Fahrzeugs mithilfe von Funkwellen. So können sie den Abstand und bestimmte Bewegungsmuster von Objekten erkennen. Diese Informationen sind die Voraussetzung für zahlreiche Fahrzeugfunktionen. |
| Parksensoren | Diese Sensoren nutzen Ultraschallwellen, um Objekte in relativ kurzer Entfernung zu erkennen. Hierfür senden sie Ultraschallwellen aus, die auf die Sensoren zurückgeworfen werden, wenn sie auf ein Objekt treffen. |
Wie die Systeme zusammenwirken
Die verschiedenen Erkennungsarten ergänzen einander. Manchmal werden sie einzeln eingesetzt, manchmal aber auch kombiniert.
Wichtig
Grundsätzliche Grenzen von Erfassungs- und Erkennungssystemen
- Das Fahrzeug kann unvorhergesehene oder untypische Situationen nicht in jedem Fall richtig deuten. Wenn das Fahrzeug sein Umfeld oder die Verkehrssituation nicht eindeutig zuordnen kann, wirkt sich dies auf die Genauigkeit seiner Reaktion aus.
- Schäden am Fahrzeug können sich darauf auswirken, wie die Erkennung und darauf basierende Systeme funktionieren. Wenn ein Fehler vorliegt, wird dies zwar häufig, aber nicht immer vom Fahrzeug erkannt. Daher ist es wichtig, immer für einen guten und funktionstüchtigen Zustand des Fahrzeugs zu sorgen. Wenden Sie sich an eine Volvo Vertragswerkstatt, wenn Sie einen Fehler vermuten oder einen Schaden am Fahrzeug feststellen.
- Begrenzende Faktoren und Bedingungen können zusammenfallen und tun dies auch häufig. Sie können sich aufsummieren und in einer Weise zusammenwirken, die zu einer falschen Reaktion des Fahrzeugs führt.
Grenzen der Hinderniserkennung
Die Hinderniserkennung hilft dem Fahrzeug, bestimmte stehende und sich bewegende Objekte zu erkennen. Dabei kann es sich um andere Verkehrsteilnehmer wie Fußgänger oder andere Fahrzeuge, Tiere, Absperrungen oder andere Gegenstände handeln. Befinden diese sich im oder nahe am Fahrweg des Fahrzeugs, können sie ein Kollisionsrisiko darstellen. Je nach den Umständen kann das Fahrzeug warnen oder eingreifen, wenn das Objekt genau erkannt wird. Bei allen Arten von Objekten, die das Fahrzeug erkennen kann, gibt es viele Faktoren, die eine genaue Erkennung verhindern können. Beispiele für einschränkende Faktoren, Situationen und Ereignisse sind:
- Nah beieinander liegende, sich überschneidende oder teilweise verdeckte Objekte und Verkehrsteilnehmer.
- Objekte und Verkehrsteilnehmer, die mit dem Hintergrund verschmelzen.
- Objekte und Verkehrsteilnehmer, die sich besonders schnell bewegen oder beschleunigen.
- Ungewöhnliche Fahrzeuge, z. B. Liegeräder, Mähdrescher oder Anhänger mit ungewöhnlich geformten Lasten.
- Fahrräder eines anderen Typs oder einer anderen Größe als ein normales Erwachsenenfahrrad.
- Neue Verkehrsträger.
- Kleidung oder mitgeführte Gegenstände, die die Silhouette eines Fußgängers verändern.
- Fußgänger, die kleiner als 80 cm (32 Zoll) sind.
- Hindernisse, die so abgewinkelt sind, dass sie eine unbekannte Silhouette bilden.
- Größe und Geschwindigkeit von Tieren. Katzen und Hunde sind oft zu klein für eine zuverlässige Erkennung.
Hinweis
Beispiele für die Verkehrserkennung
Beispiele für verschiedene Verkehrsszenarien können Ihnen dabei helfen, einige der Grenzen der Erkennungssysteme Ihres Fahrzeugs zu verstehen. Reale Szenarien sind oft komplexer als die illustrativen1 Beispiele in dieser Bedienungsanleitung.
Objekte außerhalb des Sichtfelds und späte Erkennung
Die verschiedenen Erkennungsbereiche in der Umgebung Ihres Fahrzeugs sind statisch und haben jeweils eine begrenzte Reichweite und ein begrenztes Sichtfeld. Wenn ein Objekt in einem ungewöhnlichen Winkel, mit hoher Geschwindigkeit oder sehr nahe an Ihrem Fahrzeug in den Erfassungsbereich eindringt, kann dies eine schnelle Reaktion auslösen. Dies verringert die Sicherheitsabstände im Vergleich zu einer Situation, in der eine frühere Erkennung möglich war.
Wichtig
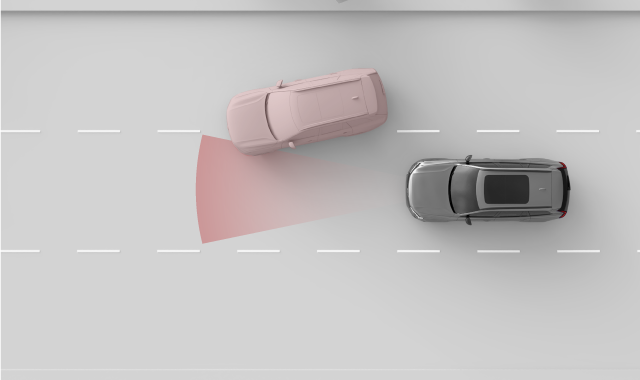
Position der Fahrspuren und kleine Fahrzeuge
Für die Erkennung nach vorn ist die Mitte der Fahrspur günstiger als ihre beiden Ränder. Fahrzeuge können unerkannt bleiben, wenn sie sich nicht in der Mitte der Fahrspur befinden. Obwohl dies bei jedem Fahrzeug passieren kann, ist das Risiko bei kleinen Fahrzeugen wie Motorrädern höher. Sie nehmen weniger Platz auf der Fahrbahn ein und können sich dadurch stärker auf der Fahrbahn bewegen. Achten Sie immer besonders auf Fahrzeuge, die nicht in der Mitte der Fahrspur fahren.
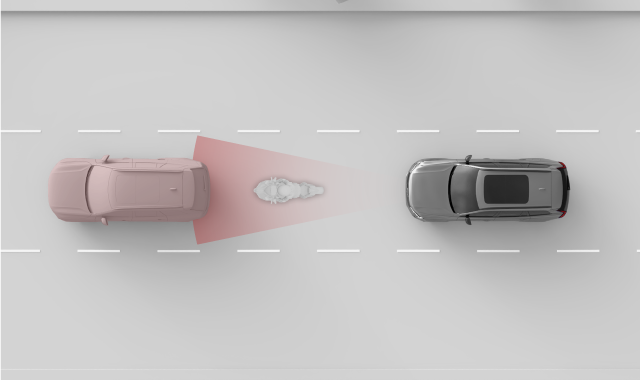
Form, Größe und Anzahl von Objekten
- Kleine Objekte lassen sich schwieriger erkennen.
- Je mehr Objekte vorhanden sind, desto schwieriger ist es, einzelne Objekte zu erkennen.
- Nahe beieinander liegende Objekte, die sich überschneiden, sind schwieriger zu erkennen.
- Objekte mit ungleichmäßiger Form, z. B. mit Überhängen oder herausstehenden Teilen, sind schwieriger zu erkennen.
Die Radarsignatur eines großen vorausfahrenden Fahrzeugs kann die Erkennung eines kleineren Fahrzeugs, z. B. eines Motorrads, erschweren.
Wichtig
Vorausfahrendes Fahrzeug mit Anhänger
Im Vergleich zu vielen anderen Fahrzeugen im Straßenverkehr funktioniert die Erkennung von Anhängern aufgrund ihrer Form und Höhe oft weniger zuverlässig. Dies gilt insbesondere für schmale und niedrige Anhänger sowie für Anhänger mit sehr hoher Ladefläche. Diese Arten von Anhängern besitzen oft nicht genügend Fläche in der Höhe, auf die sich die vorderen Erkennungssysteme konzentrieren.
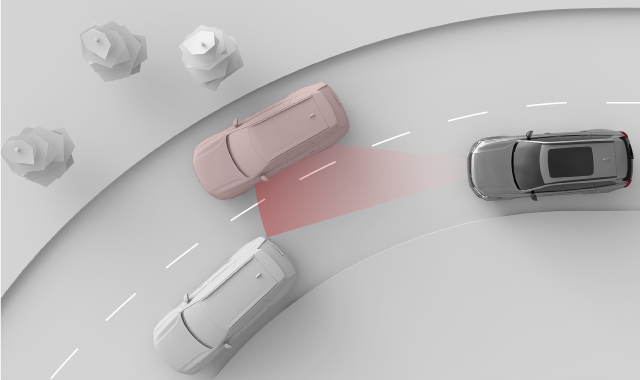
Straße und Infrastruktur
Kurven können dazu führen, dass das Fahrzeug die Verkehrssituation falsch interpretiert. So kann der Radar ein Fahrzeug z. B. aus dem Blick verlieren oder in einer falschen Spur verorten.
Wichtig
Zustand und Unregelmäßigkeiten der Straße
- Scharfe Kurven und Unebenheiten auf der Straße können vorübergehend wichtige Teile der Umgebung des Fahrzeugs wie andere Fahrzeuge oder Straßenmarkierungen verdecken.
- Nicht normgerechte oder ungewöhnliche Straßeninfrastrukturen werden vom Fahrzeug möglicherweise nicht richtig erkannt. Straßenarbeiten oder Umleitungen können z. B. dazu führen, dass Markierungen sich widersprechen oder mehrfach vorhanden sind.
- Abgenutzte Straßenmarkierungen oder -schilder werden möglicherweise nicht richtig erkannt.