パークアシスト・パイロット(PAP)* - 操作
パークアシスト・パイロット(PAP – Park Assist Pilot)は、まず十分なスペースがあるかを確認し、その後ステアリングホイールを操作して、運転者が車両を一定のスペースに駐車する作業をサポートします。
異なる操作を行う必要がある場合、コンバインド・メーター・パネルはシンボル、グラフィックおよびテキストを使用して、必要な操作を表示します。
ノート
駐車中にステアリングホイールを操作する際、ステアリングホイールの位置によっては、メーター・パネルの指示が見えなくなることがありますのでご注意ください。
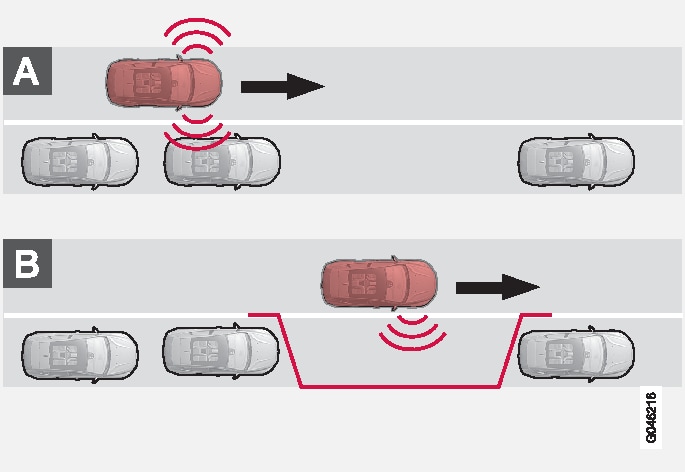
1 - スペースの探索と広さの確認
ノート
PAP機能はスペースの寸法を測り、車両を操舵します。運転者の役割は以下の通りです。
- 車両周辺に目を配ります
- コンバインド・メーター・パネルに表示される指示に従います
- ギヤシフトを行います(後退/前進)
- 安全速度の制御、維持を行います
- ブレーキを操作し、停止します
ノート
PAP が駐車スペースを探しているときは、車両から駐車スペースまでの距離が0.5~1.5 mである必要があります。
PAP機能は駐車スペースを探して、その広さが十分かどうかを確認します。次の手順に従ってください。

1. このボタンを押してPAPを起動させます。走行速度は30 km/h (20 mph)以下に維持してください。
| 2. | コンバインド・メーター・パネルを注視し、グラフィックおよびテキストで停車を指示されたときにすぐに停車できるようにしておきます。 |
| 3. | グラフィックおよびテキストで停車を指示されたときに停車します。 |
ノート
PAP は車両の助手席側にある駐車スペースを探し、指示を表示して、車両を案内します。しかし、必要であれば、運転席側の路上に駐車させることもできます。
- 運転席側の方向指示器を作動させてください。システムは運転席側の駐車スペースを探します。
2 - 後退
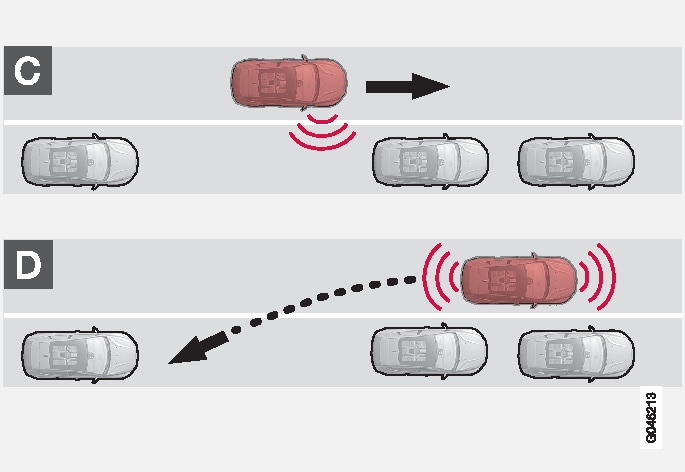
車両の後退時、PAPは車両を操舵して、駐車スペース内に誘導します。次の手順に従ってください。
- 車両の後方に障害物がないことを確認して、リバースギヤに入れます。
- ステアリングホイールにふれることなく、車両を7 km/h (4 mph)以下の速度で慎重に後退させます。
- コンバインド・メーター・パネルを注視し、グラフィックおよびテキストで停車を指示されたときにすぐに停車できるようにしておきます。
ノート
- PAP機能が作動している間は、ステアリングホイールに手を触れないようにしてください。
- ステアリングホイールの動きが一切妨げられず、自由に回転できるようにしてください。
- 最適な結果を得るためには、ステアリングホイールが回転し終わるのを待ってから、前進/後進を始めてください。
3 - 位置調整
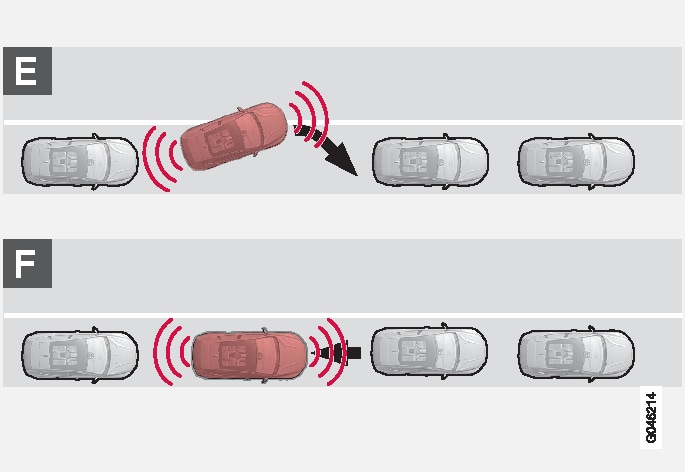
車両が後退して駐車スペースに入ったら、車両の位置をまっすぐに修正して位置を調整する必要があります。
- 1速ギヤか D 位置にし、ステアリングホイールが動きを止めるまで待ち、その後ゆっくり前進してください。
- グラフィックおよびディスプレイテキストで停車を指示されたときに停車します。
- リバースギヤにして、車両を後退させ、グラフィックおよびディスプレイテキストで停車を指示された時点で停車します。
機能が自動的にオフになり、画像とメッセージにより、駐車が完了したことが表示されます。後で運転者による位置の修正が必要になることがあります。正しく駐車されているかどうかは、運転者のみが判断できます。
重要
パークアシストがセンサーを使用するときと比べ、PAPがセンサーを使用するときには、警告距離が短くなります。