Bilens evne til å forstå omgivelsene beror på mange systemer og ulike typer sensorer. Bilens tolkning av dataene den innhenter, danner grunnlag for bilens atferd, spesielt når det gjelder førerstøttefunksjoner.
| Kameraer | Kameraer fungerer på en måte som ligner på det menneskelige øyet. Det de fanger, brukes til forskjellige formål, som er avhengige av kameraet. For eksempel hjelper det øvre foroverrettede kameraet bilen å identifisere trafikkskilt og veimerking, mens bildet fra det bakoverrettede parkeringskameraet vises i displayet. |
| Radarer | Radarer bruker radiobølger til å samle inn informasjon om bilens omgivelser. De kan fastslå avstanden til objekter og visse aspekter ved deres bevegelse. Denne informasjonen er nødvendig for mange funksjoner i bilen. |
| Ultrasoniske parkeringssensorer | Disse sensorene bruker lydbølger til å detektere objekter på relativt kort avstand. De fungerer ved at de sender ut ultralydpulser som reflekteres tilbake til sensorene når de treffer et objekt. |
Hvordan systemer fungerer sammen
De forskjellige deteksjonstypene utfyller hverandre. Av og til brukes de alene, og av og til sammen.
Viktig
Generelle begrensninger for deteksjon og identifikasjon
- Bilen kan ikke alltid takle uforutsigbare eller uvanlige situasjoner. Når bilen har problemer med å tolke omgivelsene eller trafikksituasjonen, går dette ut over nøyaktigheten til bilens respons.
- Skader på bilen kan påvirke detektering og funksjoner som er avhengig av dette. Bilen kan oppdage mange feil, men enkelte vil den kanskje ikke klare å oppdage selv. Derfor er det viktig å sørge for at bilen er i god stand og fungerer som den skal. Kontakt et autorisert Volvo-verksted hvis du har mistanke om feil på bilen eller du legger merke til skader på bilen.
- Begrensende faktorer og forhold kan, og vil ofte, forekomme samtidig. De kan forsterke hverandre og kombineres på måter som fører til feil respons fra bilen.
Begrensninger for detektering av hindringer
Detektering av hindringer hjelper bilen å identifisere visse stillestående objekter og objekter i bevegelse. Disse objektene kan være andre trafikanter, som fotgjengere eller kjøretøy, dyr, sperrer eller andre objekter. Hvis de befinner seg nær bilens kjørebane, kan de utgjøre en kollisjonsfare. Avhengig av omstendighetene kan bilen være i stand til å varsle eller gripe inn hvis objektet identifiseres korrekt. For alle typer objekter som bilen kan identifisere, er det mange faktorer som kan hindre korrekt identifikasjon. Eksempler på begrensende faktorer, situasjoner og hendelser er
- objekter og trafikanter som er nær hverandre, overlapper eller delvis blokkert
- objekter og trafikanter som går i ett med bakgrunnen
- objekter og trafikanter som beveger seg eller akselererer spesielt fort
- uvanlige kjøretøy, som liggesykler, skurtreskere eller tilhengere med last med uvanlig form
- sykler av en annen type eller størrelse enn en vanlig sykkel for voksne
- nye fremkomstmidler
- klær eller bårne gjenstander som endrer en fotgjengers silhuett
- fotgjenger på under 80 cm (32 tommer)
- hindringer som er vinklet på en måte som skaper en uvant silhuett
- dyrs størrelse og hastighet Katter og hunder er ofte for små for pålitelig identifikasjon.
Nb!
Eksempler på detektering av trafikk
Følgende eksempler på forskjellige trafikkscenarier kan hjelpe deg å forstå enkelte av faktorene som virker begrensende for bilens deteksjonssystemer. Scenarier i den virkelige verden er ofte mer komplekse enn de følgende illustrerende1 eksemplene i denne veiledningen.
Ute av syne og sen detektering
De forskjellige deteksjonssystemene rundt bilen er statiske og har begrenset rekkevidde og synsfelt. Hvis noe kommer inn i en deteksjonssone i en uvanlig vinkel, i høy hastighet eller svært nær bilen, kan det føre til rask respons. Dette reduserer sikkerhetsmarginene sammenlignet med en situasjon hvor tidligere detektering var mulig.
Viktig
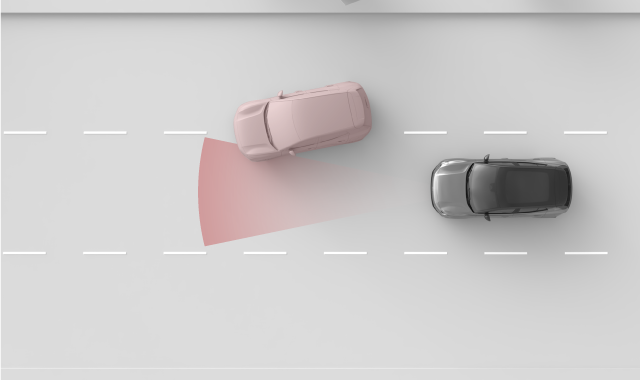
Plassering i kjørefeltet og små kjøretøy
Når det gjelder foroverrettet detektering, vektlegges midten av kjørefeltet mer enn de ytre delene. Kjøretøy kan unngå detektering hvis de ikke ligger i midten av kjørefeltet. Dette kan skje med alle typer kjøretøy, men risikoen er ekstra stor for små kjøretøy, som motorsykler. De fyller mindre av kjørefeltets bredde, og kan bevege seg mer fra side til side i kjørefeltet. Vær alltid ekstra oppmerksom på kjøretøy som ikke kjører i midten av kjørefeltet.
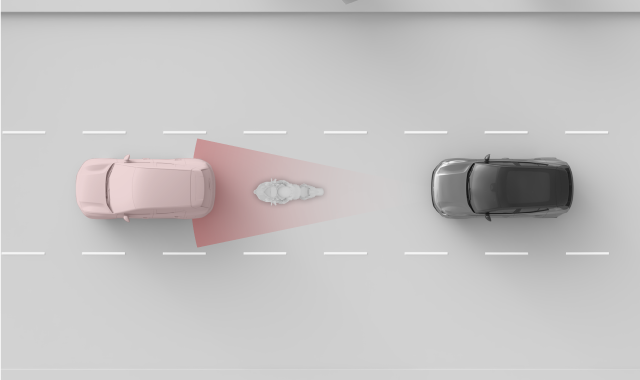
Form, størrelse og antall objekter
- Små objekter er vanskeligere å identifisere.
- Jo flere objekter, desto vanskeligere er det å identifisere de enkelte objektene.
- Objekter som er nær hver andre og overlapper, er vanskeligere å identifisere.
- Objekter med ujevne former, for eksempel med overheng eller utstikkende deler, er vanskeligere å identifisere.
Hvis det befinner seg et stort kjøretøy foran, kan det gjøre det vanskelig å identifisere et mindre kjøretøy, for eksempel en motorsykkel.
Viktig
Tilhenger foran
Detektering av tilhengere er ofte mindre pålitelig enn detektering av andre kjøretøy, på grunn av formen og høyden. Dette gjelder spesielt smale tilhengere, lave tilhengere og tilhengere med svært høyt lasteplan. Denne typen tilhenger har ofte ikke nok overflateareal i høyden som det foroverrettede deteksjonssystemet fokuserer på.
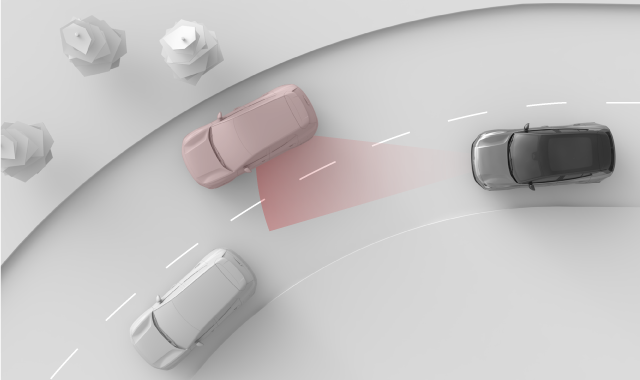
Vei og infrastruktur
Svinger i veien kan føre til at bilen feiltolker trafikksituasjonen. For eksempel kan den miste kontakten med et kjøretøy eller feiltolke hvilket kjørefelt et forankjørende kjøretøy ligger i.
Viktig
Veiforhold og uregelmessigheter
- Skarpe svinger og dumper i veien kan midlertidig skjule deler av bilens omgivelser, for eksempel andre kjøretøy og veimerking.
- Ustandardisert eller uvanlig veiinfrastruktur kan bli feilidentifisert av bilen. For eksempel kan veiarbeid eller omkjøringer føre til motstridende veimerking eller flere sett med veimerking.
- Slitt veimerking eller slitte skilt vil kanskje ikke bli korrekt identifisert.