Twój samochód może monitorować otoczenie przy użyciu wielu systemów i typów czujników. Interpretacja danych zbieranych przez samochód pomaga zrozumieć jego działanie, co jest szczególnie ważne dla funkcji wspomagania kierowcy.
| Kamery | Kamery działają podobnie jak ludzkie oko. Rejestrowane przez nie dane są wykorzystywane do różnych celów zależnych od kamery. Przykładowo górna kamera przednia pomaga samochodowi identyfikować takie obiekty jak znaki drogowe i oznaczenia na drodze, podczas gdy obraz rejestrowany przez tylną kamerę parkowania pojawia się na wyświetlaczu. |
| Radary | Radary wykorzystują fale radiowe do zbierania informacji o otoczeniu samochodu. Mogą ustalać odległość od obiektów i niektóre warunki związane z ich ruchem. Te informacje są niezbędne do działania wielu funkcji samochodu. |
| Ultradźwiękowe czujniki parkowania | Te czujniki wykorzystują fale dźwiękowe do wykrywania obiektów w stosunkowo niewielkiej odległości. Wysyłają impulsy ultradźwiękowe, które wracają do czujników po odbiciu się od obiektu. |
Współpraca systemów
Różne funkcje wykrywania wzajemnie się uzupełniają. Czasami są używane niezależnie, a czasami razem.
Ważne
Ogólne ograniczenia wykrywania i identyfikacji
- Samochód nie zawsze może sobie poradzić w nieprzewidywalnych lub nietypowych sytuacjach. W razie trudności z prawidłową identyfikacją otoczenia lub sytuacji w ruchu drogowym dokładność reakcji samochodu będzie gorsza.
- Uszkodzenie samochodu może wpływać na wykrywanie i zależne funkcje. Samochód może samodzielnie zidentyfikować wiele usterek, ale nie wszystkie. Dlatego należy utrzymywać samochód w dobrym stanie i sprawny. Jeśli podejrzewasz usterki lub zauważysz uszkodzenie samochodu, skontaktuj się z autoryzowaną stacją obsługi Volvo.
- Warunki i czynniki ograniczające mogą i często się pokrywają. Mogą się łączyć i oddziaływać na siebie w sposób, który prowadzi do nieprawidłowej reakcji samochodu.
Ograniczenia wykrywania przeszkód
Twój samochód może wykrywać przeszkody oraz identyfikować w ten sposób zatrzymane i poruszające się obiekty. Mogą to być inni użytkownicy drogi, na przykład piesi lub inne pojazdy, zwierzęta, bariery lub inne obiekty. Jeśli są na torze jazdy samochód lub blisko niego, może to grozić kolizją z nimi. W zależności od okoliczności samochód może ostrzegać lub interweniować, jeśli dokładnie zidentyfikuje obiekt. Jest wiele czynników mogących uniemożliwić samochodowi dokładną identyfikację wszystkich typów obiektów. Przykładowe czynniki ograniczające, sytuacje i zdarzenia:
- Blisko rozmieszczone, zachodzące na siebie lub częściowo zasłonięte obiekty i użytkownicy drogi.
- Wtapiające się w tło obiekty i użytkownicy drogi.
- Szczególnie szybko poruszające się lub przyspieszające obiekty i użytkownicy drogi.
- Nietypowe pojazdy, takie jak rowery poziome, kombajny lub przyczepy z ładunkami o niestandardowych kształtach.
- Rowery innego typu lub rozmiaru niż standardowe rowery dla dorosłych.
- Nowe środki transportu.
- Odzież lub niesione przedmioty zmieniające sylwetkę pieszego.
- Piesi o wzroście poniżej 80 cm (32 cali).
- Przeszkody ustawione pod kątem tak, że mają nieznaną sylwetkę.
- Wielkość i szybkość zwierząt. Koty i psy często są zbyt małe, by można je niezawodnie zidentyfikować.
Uwaga
Przykłady wykrywania ruchu drogowego
Poniższe przykłady różnych scenariuszy ruchu drogowego mogą pomóc w zrozumieniu niektórych ograniczeń systemów wykrywających w samochodzie. Rzeczywiste scenariusze często są bardziej złożone niż przykłady przedstawione1 w tej instrukcji.
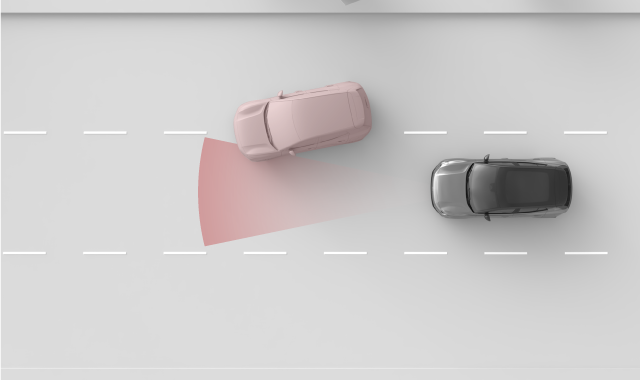
Brak widoczności i późne wykrywanie
Różne strefy wykrywania wokół Twojego samochodu są statyczne, a każda z nich ma ograniczony zasięg i pole widzenia. Jeśli jakiś obiekt znajdzie się w strefie wykrywania pod nietypowym kątem, z dużą prędkością lub bardzo blisko Twojego samochodu, może spowodować szybką reakcję. Zmniejsza to margines bezpieczeństwa w porównaniu z sytuacją, w której możliwe było wcześniejsze wykrycie.
Ważne
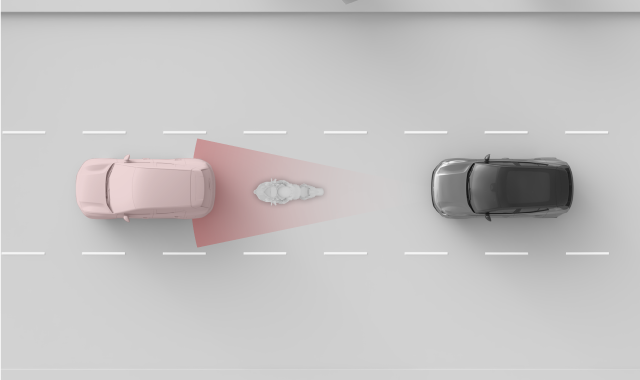
Rozmieszczenie pasów ruchu i małe pojazdy
Wykrywanie z przodu jest skuteczniejsze na środku pasa ruchu w porównaniu z jego skrajnymi częściami. Pojazdy mogą nie zostać wykryte, gdy nie są na środku pasa ruchu. Chociaż dotyczy to wszystkich pojazdów, ryzyko jest większe w przypadku tych mniejszych, na przykład motocykli. Zajmują mniejszą szerokość pasa ruchu i mogą w większym stopniu przemieszczać się na nim. Zawsze zwracaj szczególną uwagę na każdy pojazd, który nie jedzie środkiem pasa ruchu.
Kształt, wielkość i liczba obiektów
- Małe obiekty jest trudniej zidentyfikować.
- Im więcej obiektów, tym trudniej zidentyfikować poszczególne z nich.
- Obiekty będące blisko siebie i zachodzące na siebie są trudniejsze do zidentyfikowania.
- Obiekty o nierównomiernych kształtach, na przykład mające zwisy lub wystające części, są trudniejsze do zidentyfikowania.
Obecność dużego pojazdu z przodu może utrudniać zidentyfikowanie mniejszego pojazdu, na przykład motocykla.
Ważne
Przyczepa z przodu
W porównaniu z wieloma innymi pojazdami na drodze wykrywanie przyczep często jest mniej niezawodne ze względu na ich kształt i wysokość. Dotyczy to zwłaszcza wąskich i niskich przyczep oraz przyczep z bardzo wysokimi platformami ładunkowymi. Tego typu przyczepy często nie mają odpowiednio dużej powierzchni na wysokości, na której skupiają się systemy wykrywania z przodu.
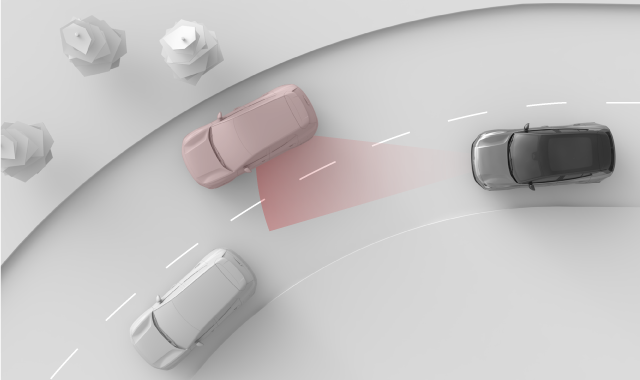
Droga i infrastruktura
Zakręty na drodze mogą utrudniać samochodowi prawidłowo interpretację sytuacji. Może na przykład utracić z pola widzenia monitorowany pojazd lub nieprawidłowo zidentyfikować, na którym pasie jest pojazd poprzedzający.
Ważne
Stan drogi i nierówności
- Ostre zakręty i nierówności na drodze mogą chwilowo zasłonić ważne elementy otoczenia samochodu, takie jak inne pojazdy lub oznaczenia drogowe.
- Niestandardowa lub nietypowa infrastruktura drogowa może nie zostać prawidłowo zidentyfikowana przez samochód. Przykładowo roboty drogowe lub objazdy mogą spowodować zarejestrowanie sprzecznych oznaczeń na drodze lub wielu ich zestawów.
- Zużyte oznaczenia lub znaki drogowe mogą nie zostać prawidłowo zidentyfikowane.