Pola detekcji czujników tylnych i przednich
| Kolory pól z tyłu | Odległość w metrach (stopach) |
|---|---|
| Żółty | 0,6-1,5 (2,0-4,9) |
| Pomarańczowy | 0,3–0,6 (1,0–2,0) |
| Czerwony | 0-0,3 (0-1,0) |
| Kolory pól z przodu | Odległość w metrach (stopach) |
|---|---|
| Żółty | 0,6–0,8 (2,0–2,6) |
| Pomarańczowy | 0,3–0,6 (1,0–2,0) |
| Czerwony | 0-0,3 (0-1,0) |
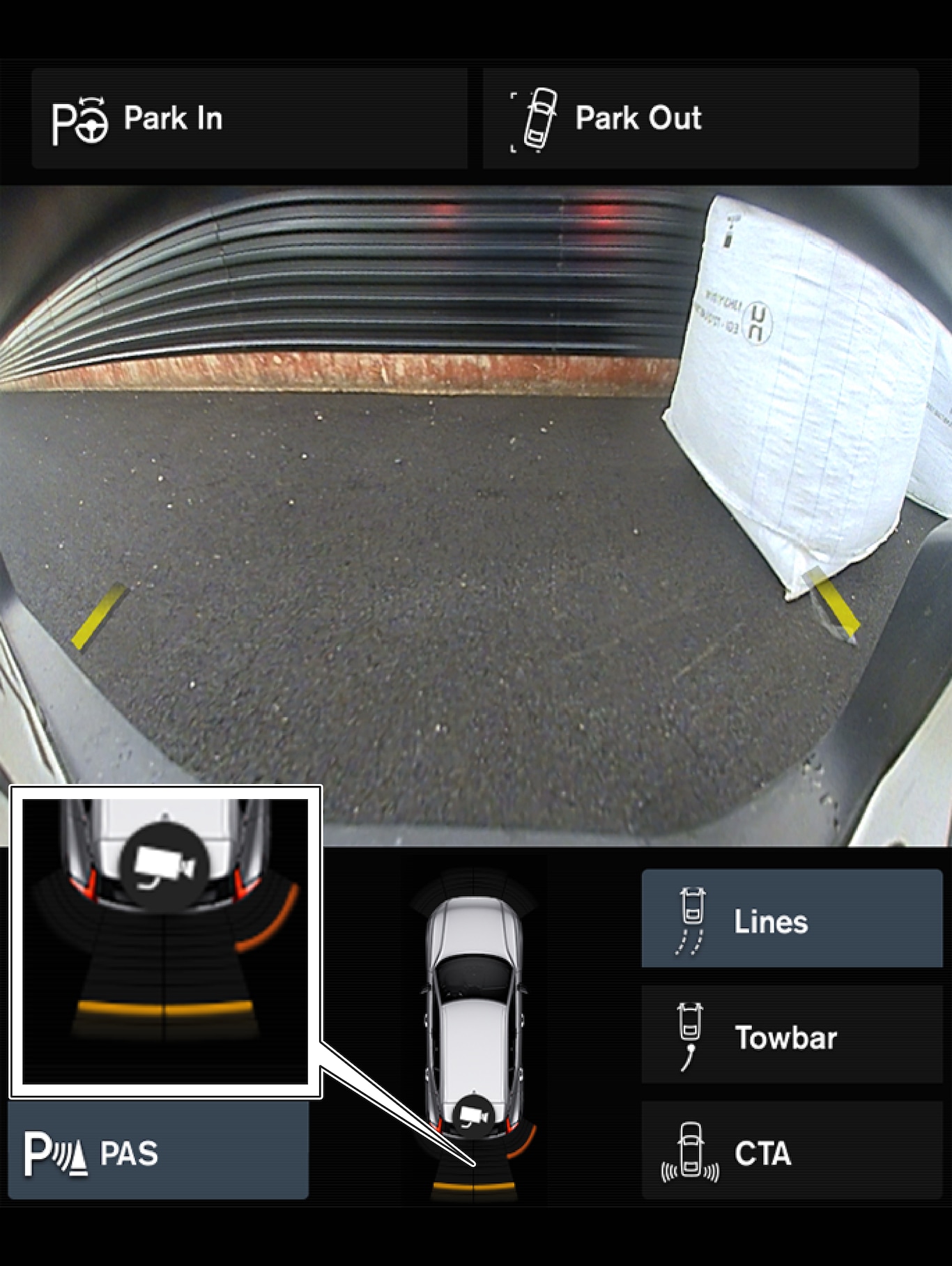
W przypadku CZERWONYCH pól czujników pulsujący sygnał dźwiękowy przechodzi w dźwięk ciągły.
Pola detekcji czujników bocznych
Sygnały ostrzegawcze zależą od planowanego toru jazdy samochodu. Dlatego przy skręconej kierownicy może także pojawić się ostrzeżenie przed przeszkodami znajdującymi się po skosie z przodu lub z tyłu samochodu, a nie bezpośrednio przed nim lub za nim.
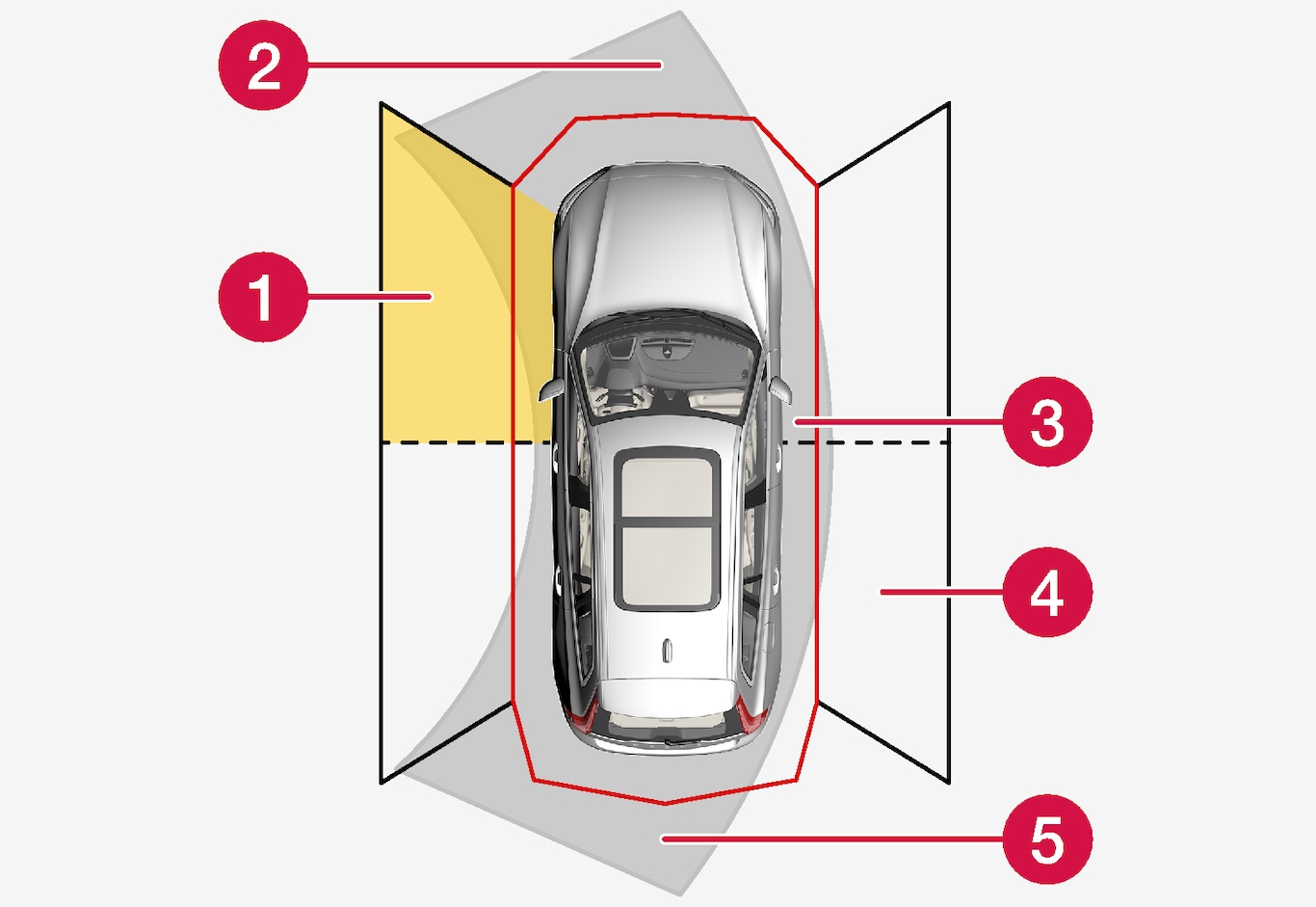
 Pole lewego przedniego czujnika
Pole lewego przedniego czujnika Sektor wykrywania przeszkód na planowanym torze jazdy samochodu do przodu – zależny od kąta skrętu kierownicy
Sektor wykrywania przeszkód na planowanym torze jazdy samochodu do przodu – zależny od kąta skrętu kierownicy Sektor z CZERWONYM kolorem pola i intensywnie pulsującym sygnałem dźwiękowym
Sektor z CZERWONYM kolorem pola i intensywnie pulsującym sygnałem dźwiękowym  Pole prawego tylnego czujnika
Pole prawego tylnego czujnika Sektor wykrywania przeszkód na planowanym torze jazdy samochodu do tyłu – zależny od kąta skrętu kierownicy.
Sektor wykrywania przeszkód na planowanym torze jazdy samochodu do tyłu – zależny od kąta skrętu kierownicy.
| Kolor pól bocznych | Odległość w metrach (stopach) |
|---|---|
| Żółty | 0,25–0,9 (0,8–3,0) |
| Czerwony | 0–0,25 (0–0,8) |
W przypadku CZERWONYCH pól czujników pulsujący sygnał dźwiękowy przechodzi w sygnał intensywnie pulsujący.