Funkcja CTA nie działa optymalnie we wszystkich sytuacjach, lecz ma pewne ograniczenia. Czujniki funkcji CTA nie „widzą” na przykład przez inne zaparkowane pojazdy albo przez przeszkody.
Oto kilka przykładów sytuacji, w których „pole widzenia” funkcji CTA może być od początku ograniczone i zbliżające się pojazdy nie będą wtedy wykrywane aż do momentu, gdy znajdą się bardzo blisko:
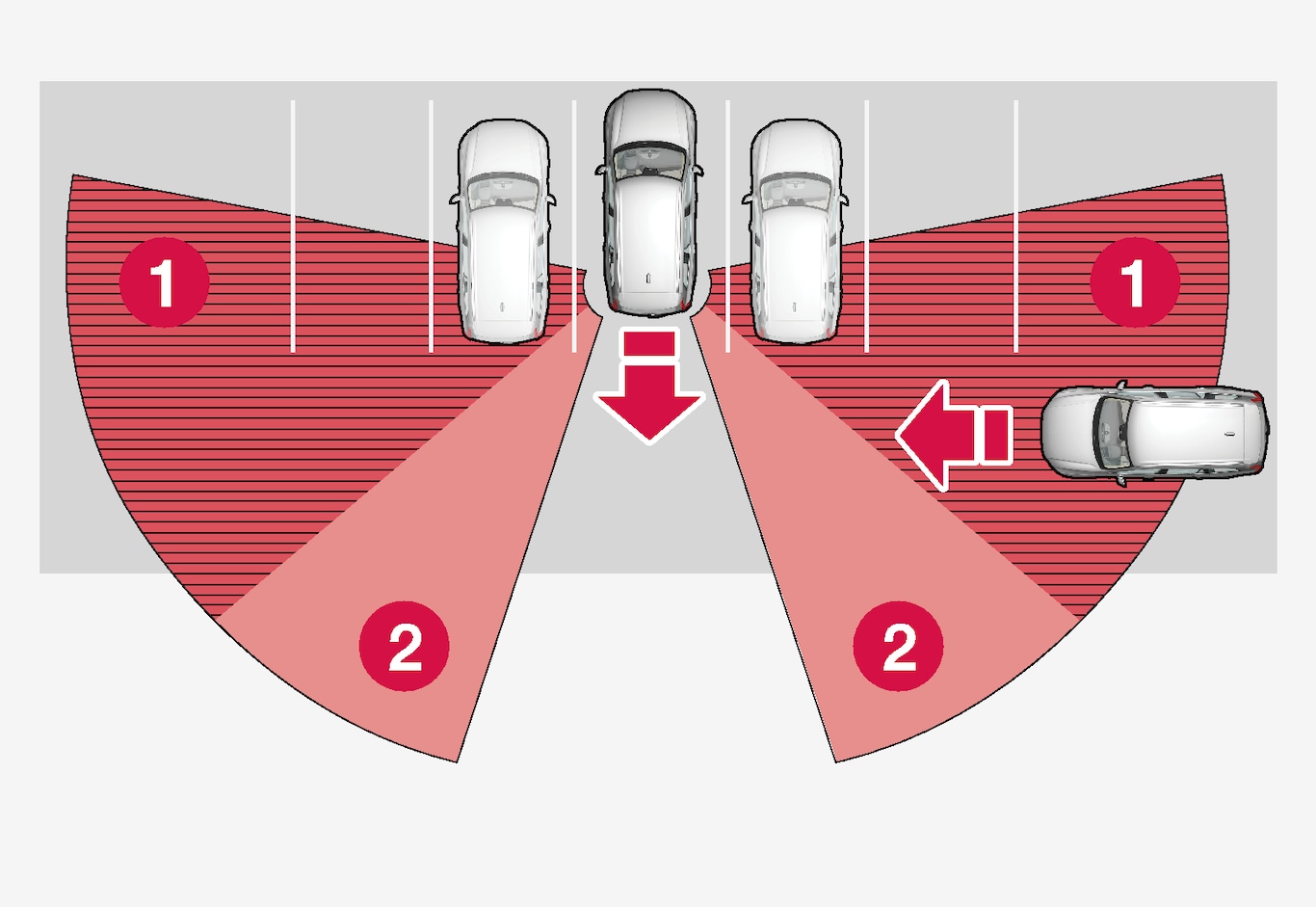
 Sektor niewidoczny dla układu CTA.
Sektor niewidoczny dla układu CTA. Sektor, w którym układ CTA wykrywa/„widzi” inne pojazdy.
Sektor, w którym układ CTA wykrywa/„widzi” inne pojazdy.
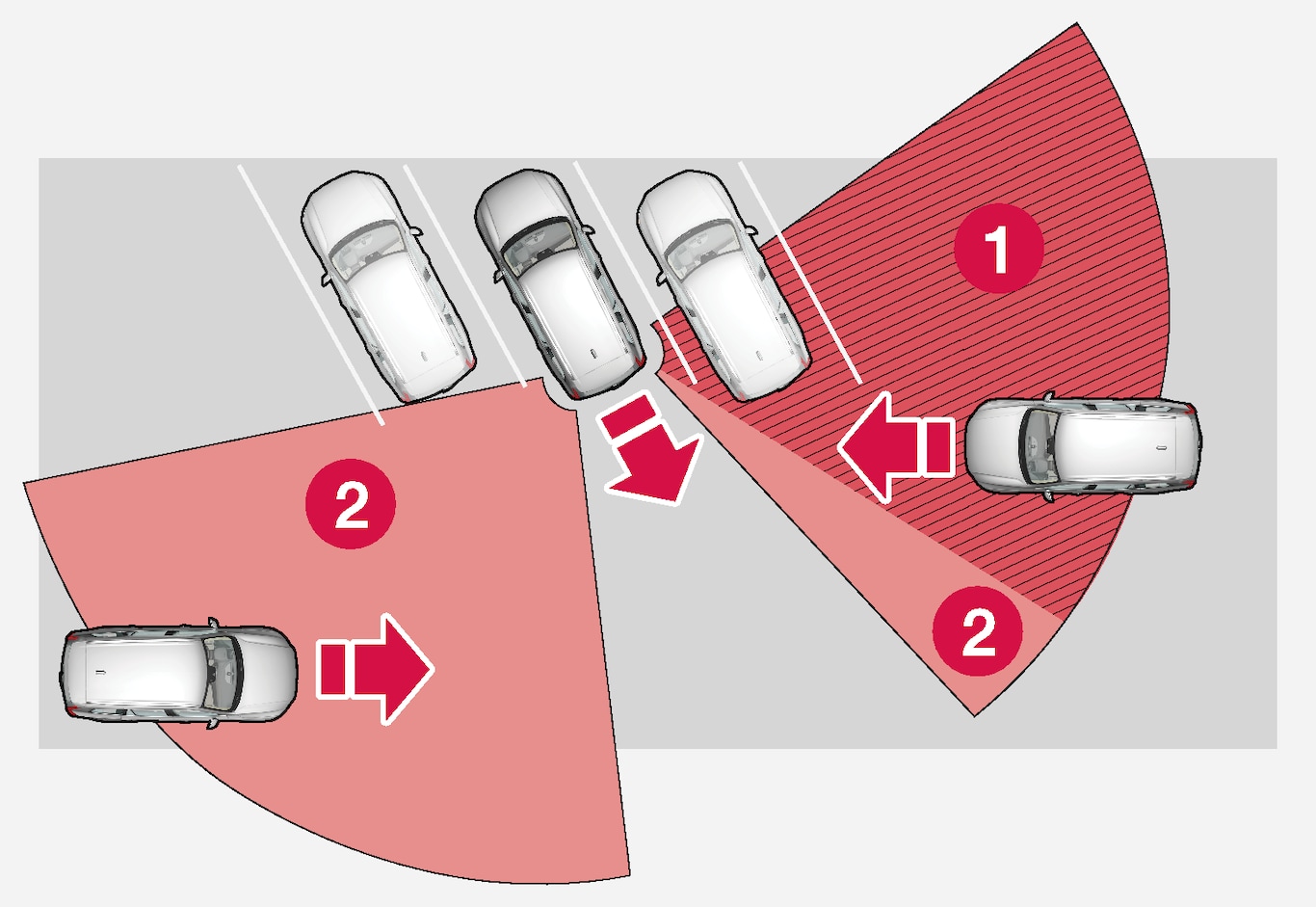
Jeśli jednak samochód będzie powoli się cofać, kąt w stosunku do pojazdu/obiektu zasłaniającego widoczność będzie się zmieniać i w pewnym momencie wielkość niewidocznego sektora ulegnie nagłemu zmniejszeniu.
Przykłady innych ograniczeń
- Funkcja automatycznego hamowania wykrywa tylko poruszające się pojazdy i dlatego nie może „zobaczyć” i zahamować w reakcji na nieruchome obiekty, na przykład rowerzystę lub pieszego.
- Zabrudzenia, lód lub śnieg pokrywające czujniki mogą ograniczyć ich działanie i uniemożliwić ostrzeganie kierowcy. Dodatkowe informacje zamieszczono w rozdziale „Zalecana obsługa techniczna układu Cross Traffic Alert”.
- Funkcja CTA zostaje automatycznie wyłączona, gdy do układu elektrycznego samochodu zostanie podłączona przyczepa, bagażnik rowerowy lub podobne urządzenie.
- Dla optymalnego działania funkcji CTA, na haku holowniczym samochodu nie powinien być zamontowany bagażnik rowerowy, towarowy ani inne podobne urządzenie.