Obraz z kamery jest wyświetlany na ekranie w konsoli środkowej.
Uwaga
Ostrzeżenie
- Układ wspomagający parkowanie z kamerą wizyjną ma charakter wyłącznie pomocniczy. W żadnym wypadku nie zwalnia kierowcy z obowiązku zachowania ostrożności oraz odpowiedzialności przy manewrowaniu samochodem.
- Kamera ma martwe pola detekcji, w których nie są wykrywane ewentualne przeszkody.
- Szczególną uwagę należy zwracać na ludzi i zwierzęta w pobliżu samochodu.
Działanie i obsługa
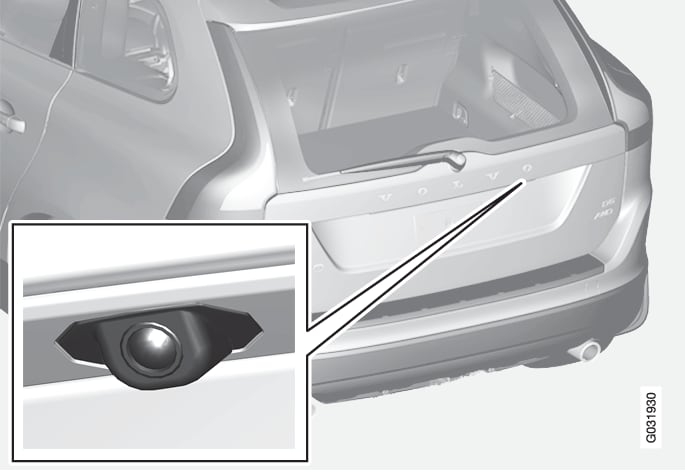
Kamera pokazuje obraz sytuacji za samochodem oraz przeszkody pojawiające się z boku.
Kamera pokazuje szeroki obszar za samochodem oraz część zderzaka i ewentualny hak holowniczy.
Obiekty na ekranie mogą wydawać się nieco przechylone, co jest normalnym objawem.
Uwaga
Jeżeli aktywny jest inny widok, układ kamery wspomagania parkowania automatycznie przejmuje ekran i pojawia się na nim obraz z kamery.
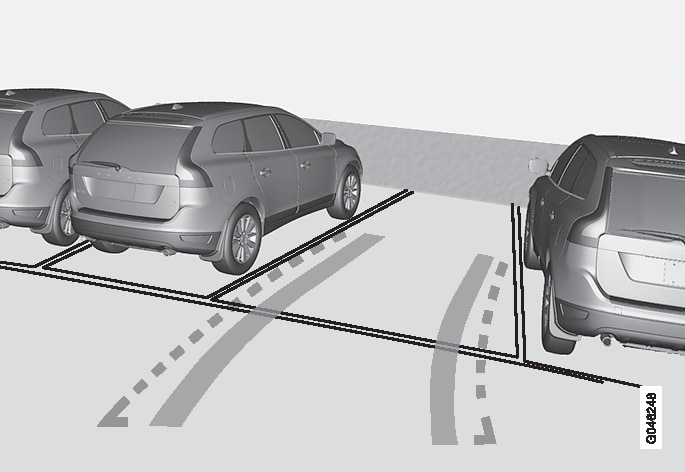
Po włączeniu biegu wstecznego pojawiają się dwie linie ciągłe, które w sposób graficzny pokazują tor jazdy tylnych kół samochodu przy aktualnym kącie skrętu kierownicy – ułatwia to parkowanie równoległe, cofanie w ciasnych miejscach i podjeżdżanie do przyczepy w celu jej podłączenia. Przybliżony obrys zewnętrzny samochodu jest przedstawiony za pomocą przerywanych linii. Linie pomocnicze układu wspomagania parkowania można wyłączyć – patrz punkt Ustawienia .
Jeżeli samochód jest również wyposażony w czujniki wspomagania parkowania *, to przekazywane przez nie informacje są wyświetlane graficznie w postaci barwnych pól określających odległość od wykrytych przeszkód, patrz punkt „Samochody z czujnikami cofania” w dalszej części instrukcji.
Kamera pozostaje włączona przez około 5 sekund od wyłączenia biegu wstecznego albo do momentu, w którym prędkość samochodu przekroczy 10 km/h (6 mph) podczas jazdy do przodu lub 35 km/h (22 mph) podczas jazdy do tyłu.
Warunki oświetleniowe
Obraz z kamery jest dostosowany automatycznie do panujących warunków oświetlenia. Z tego powodu jasność i jakość obrazu na ekranie mogą ulegać niewielkim wahaniom. Słabe warunki oświetleniowe mogą spowodować nieznaczne pogorszenie jakości obrazu.
Uwaga
Linie prowadzące
Pokazywane na ekranie linie prowadzące ulokowane są na poziomie podłoża za samochodem, a ich położenie jest bezpośrednio związane z ruchami kierownicy. W ten sposób pokazują kierowcy tor, po jakim samochód będzie się przemieszczać, także podczas skręcania.
Uwaga
- Podczas cofania z przyczepą, która nie jest podłączona do instalacji elektrycznej samochodu, linie na wyświetlaczu będą pokazywać przewidywany tor jazdy samochodu, a nie przyczepy.
- Żadne linie nie są pokazywane na ekranie, jeżeli przyczepa jest podłączona do instalacji elektrycznej samochodu.
- W przypadku podłączenia przyczepy za pomocą oryginalnego przewodu Volvo, kamera wspomagania parkowania zostaje automatycznie wyłączona.
Ważne
Linie obrysowe
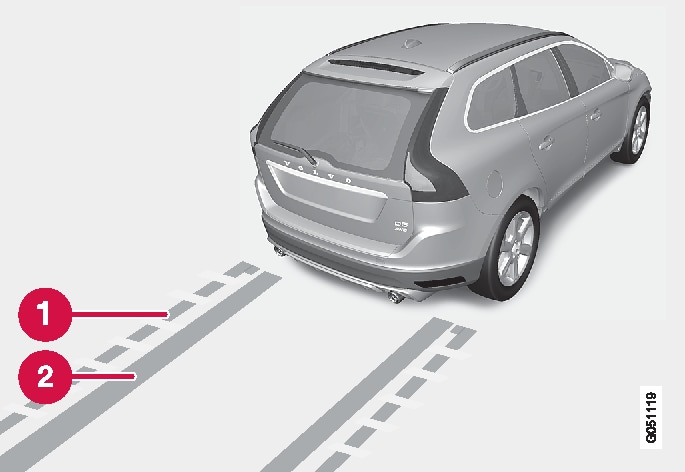
 | Linia obrysowa, strefa swobodnego cofania |
 | „Ślady kół” |
Linia przerywana (1) wyznacza strefę do około 1,5 m w tył od zderzaka. Jest to również granica najbardziej wystających części samochodu, takich jak lusterka zewnętrzne na drzwiach i narożniki – również w trakcie skręcania.
Szerokie „ślady kół” (2) pomiędzy liniami bocznymi wskazują, którędy będą toczyć się koła i mogą być przedłużone do około 3,2 m w tył od zderzaka, jeżeli na tej drodze nie ma przeszkód.
Samochody z czujnikami cofania*
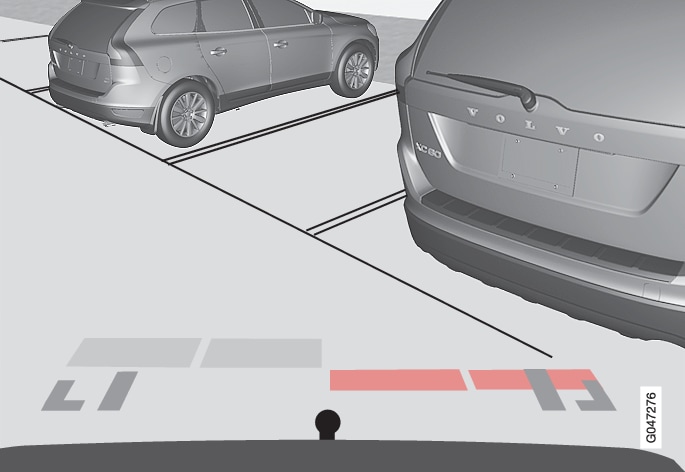
Jeśli samochód jest także wyposażony w układ wspomagania parkowania, odległość jest pokazywana w postaci barwnych pól dla każdego czujnika, który wykryje przeszkodę.
Kolor pola zmienia się wraz ze zmniejszaniem się odległości do przeszkody – od jasnożółtego, przez żółty i pomarańczowy do czerwonego.
| Kolor | Odległość (w metrach) |
|---|---|
| Jasnożółty | 0,7-1,5 |
| Żółty | 0,5–0,7 |
| Pomarańczowy | 0,3–0,5 |
| Czerwony | 0-0,3 |